This was an aftermarket protective cover case designed to fit 6th generation Apple iPad tablets. Purchased from the lowest bidder on Amazon that day (*) it did its job for several years absorbing abuse until a corner broke off and the case could no longer latch in place. It turned out a case that wouldn’t stay attached was worse than no case at all, as the iPad fell out causing a dent on the back.

While remaining three corners of this case were still attached, they all showed cracks in the plastic. Thus it was retired and replaced with a new case. Before this broken case is sent to landfill, though, I wanted to salvage its embedded magnets. This cover has the option to fold into a stand, held in shape by magnets. Closing the cover is also something detectable by the iPad, so there’s a Hall sensor inside the tablet picking up a precisely located magnet.

Using a screwdriver for its steel shaft, I could feel tugs at several locations indicating a magnet. Given how thin they must be, I expected to find a few tiny slivers of rare-earth magnets. And given the thin fabric construction, I decided to start by cutting an edge with scissors.

First magnet was quickly uncovered.

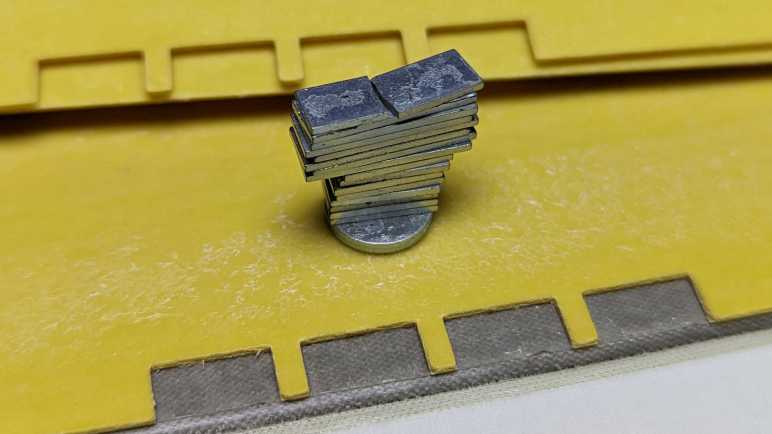
Pulling on the glued-on fabric, I uncovered the remaining magnets embedded within the first panel. Four small rectangular magnets near the middle of the edge. Surrounded by two larger rectangular magnets on either side. There’s a circular magnet as well, away from the rest. I had only expected one or two magnets, so this is an unexpected bounty.

The magnets weren’t attached to the yellow plastic backing at all, merely held in place by adhesive on either side. They could be peeled off with minimal residue. This is working out really well.

Continued peeling discovered another circular magnet in the middle panel, and another set of rectangular magnets on the third panel that matched the arrangement of magnets in the first panel. Those two arrays of rectangular magnets on outermost edges would implement the fold-into-a-stand function. The two circular magnets don’t line up to each other, I guess they are there for iPad “cover is closed” detection.

I cut into this cover expecting just a magnet or two, so I’m very happy I came out with a stack of 18 little magnets. They are very thin so it should be easy to fit them into places in future projects. In fact, they are so thin I need to worry about protecting them. This material is brittle: I broke that topmost magnet in half when peeling it off the adhesive layer, a lesson warning me to be careful with the rest.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.