I had been focused on seeing how the paper feed mechanism worked in my retired Canon Pixma MX340 multi-function inkjet, but I got distracted upon finding a large ink graveyard. Instead of ending up as ink on a page as users would prefer, a fraction of that expensive liquid was destined to be unused and instead dropped off into this absorbent diaper attached to the base.

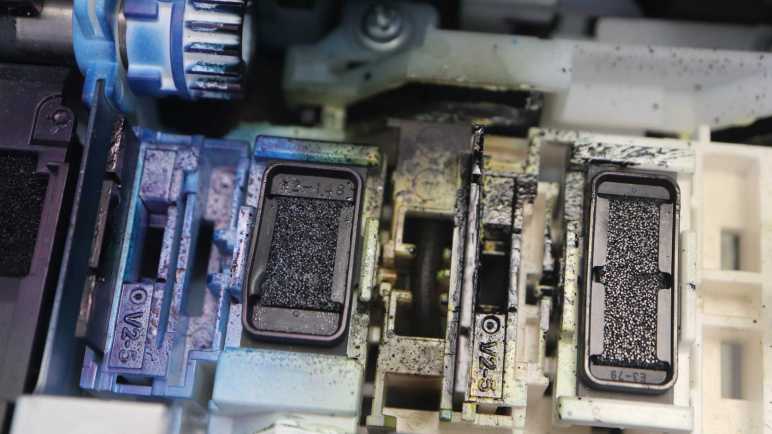
All this ink was shot out of the cartridges while the print head was sitting in its parked position. It might have been priming the print head, maybe there was a clog that needed clearing. Whatever the reason, it was sprayed into the apparently-porous center of the ink-splattered print head maintenance assembly.

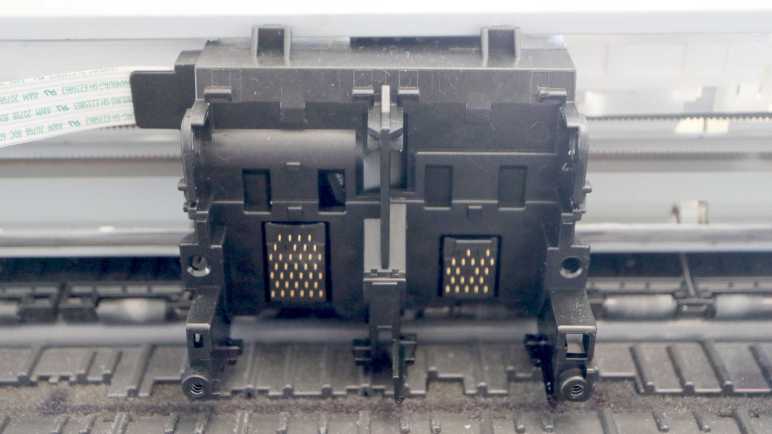
That ink was then picked up by these two tubes, one corresponding to color ink cartridge and the other for black ink.

Those tubes connect to this joint, where it’s clear the initial length of black ink tube is a different opaque material compared to remaining translucent tubes. They all feel about the same to the touch, soft and pliable despite their age. They also have the same outer diameter of about 3.8mm or possibly 0.15 inch. I suppose the difference in material is important for some reason I don’t understand. Other wise I would have expected a continuous length of tube instead of having this joint. It added parts count, assembly complexity, and risk of leaks in exchange for that unknown advantage.

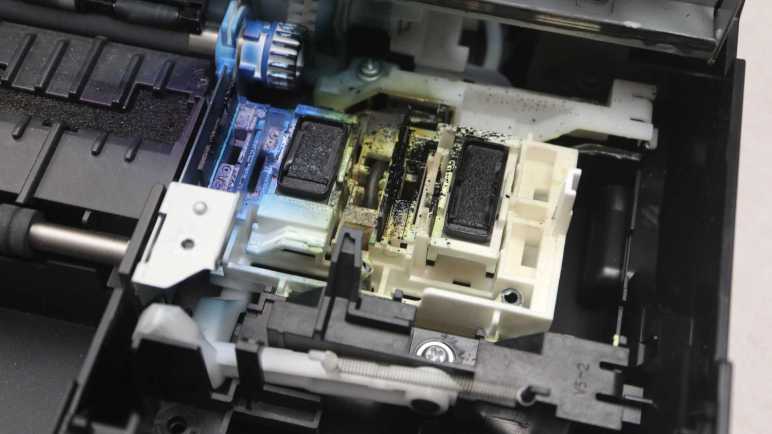
Along with the just-freed paper feed assembly, I also freed the ink maintenance assembly. Flipping it over to rest on a sheet of tissue paper to absorb stray ink, I could now see the entire routing path for both ink tubes.

The color ink tube path ended at its disposal outlet towards the front of the paper tray assembly, and the black ink tube traveled around the back to its separate disposal outlet. Both tubes traveled past a circular assembly inside the paper tray gearbox, but on opposite sides of the circle in opposite directions. This bears all the signs of a peristaltic pump making it the first thing I want to investigate when I open up that gearbox.
This teardown ran far longer than I originally thought it would. Click here to rewind back to where this adventure started.