My computer science undergraduate degree program required only a single class from the Chemistry department. It was an introductory course that covers basic chemistry concepts and their applications. Towards the end of the quarter, during a review session held by my Teaching Assistant, there was a mixup between what the TA was saying and lecture material that might be on the final exam. After some astute classmates brought up the difference, the TA was apologetic and his explanation made a strong impression:
Sorry about that. The simplification we use for this intro class isn’t what we actually use in research. Those of you who continue to get a chem degree will learn later how all of this is wrong.
This was a theme that repeated several more times in an undergraduate curriculum across different departments: The introductory course of a subject area uses a lot of simplifications that communicated rough strokes of ideas, but isn’t totally accurate.
I bring up this story because it is again true for Gazebo: a powerful and complex system for robotics simulation research and the beginner’s tutorial covers the basics by using simplifications that aren’t how serious work gets done. It’s not deceptive or misleading – it’s just a way to get oriented in the field.
This mostly manifested in the third part of the beginner’s tutorial. The first two are fairly straightforward: a brief overview page, followed by a page that described general UI concepts in the software. The third page, a quick tour of Gazebo Model Editor, is where beginners actually get some hands-on time using these simplifications.
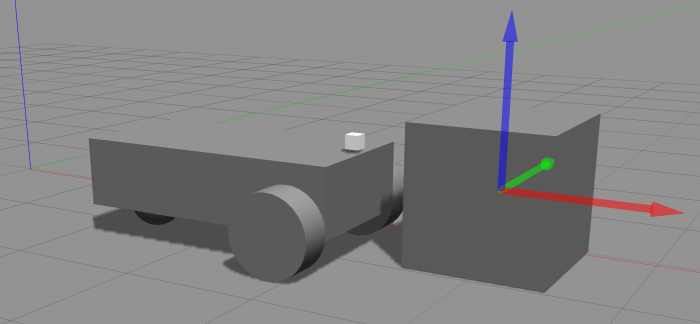
Following the tutorial, the beginner will build a simplified model of a differential drive robot. A simple cylinder represents each of the two wheels, and a sphere represents the caster. They are connected to the box of a chassis by the barest joint relationship description possible. This model skipped all of the details necessary for building a real robot. And when it comes to simulating real robots, it’s not expected to be built from scratch using Gazebo Model Editor UI. More realistic simulation robots would be written using SDF and there’s an entirely separate category of tutorials for the topic.
But despite all these simplifications not representative of actual use… the model editor tutorial does its job getting a beginner’s feet wet. I know I’ll have to spend a lot more time to learn the depths of Gazebo, but this beginner’s tutorial was enough foundation for me to look at other related topics without getting completely lost.