Once I aborted plans to split Phoebe’s second chassis design into top and bottom decks, most of the workload was concentrated into a main backbone structure that will support all three wheels – two motorized driven wheels and one caster wheel. It will also support the battery, which is the heaviest single component, and the scanning LIDAR unit salvaged from a Neato robot vacuum.
Aside from their size and weight, the common thread with these components is that I don’t expect them to change very much in Phoebe’s future. They are all of the core components of a TurtleBot: differential-drive for mobility and a LIDAR to sense its surroundings. If either of those primary items change, it’s really an entirely different robot and no longer an iteration of Phoebe.
What I do expect to evolve at a much higher rate are the electronics that will control the motors and read the sensors (both motor encoder and LIDAR.) They will be mounted on a separate electronics equipment tray which will be mounted to the front end of chassis 2 backbone. More detail on that later.
For rigidity I had planned to make everything a single piece, but I wasn’t able to figure out a good way to make a 3D-printable structure that can support the LIDAR module above the motors and still leave enough space for those motors to be installed. So the LIDAR front support became a separate C-shaped piece that is clipped onto the backbone after motors are installed.
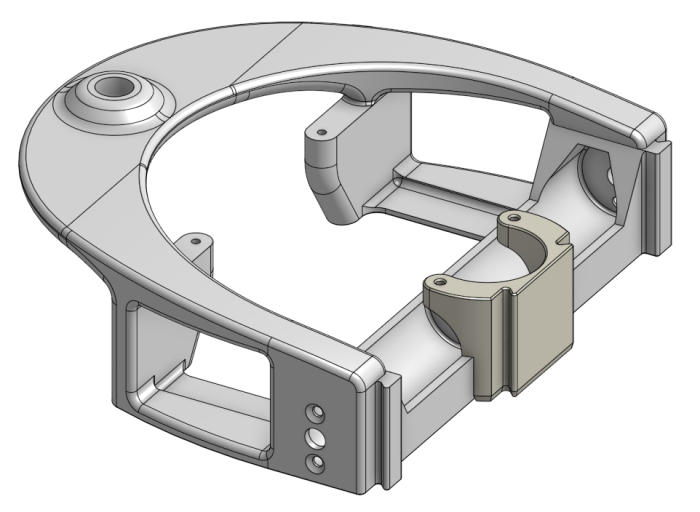
Other than that concession to practicality, Phoebe’s new backbone is a single rigid structure that links all wheels together and supports everything except the electronics. Once I had all the major connection points sketched out, I put effort into aesthetics design and making the backbone look more like one smoothly blended and integrated unit. The arch connecting all three wheels reminded me of a similar arch aboard Star Trek: The Next Generation‘s Enterprise-D bridge. (It held computer displays for the officers on duty standing behind Captain Picard.)
Printing this design requires support structures for that arch, and took over 8 hours to print. (Plus another half hour for the separate C-shaped clip.) I’m pleased with the results and, as expected, it has held up well through multiple iterations of the electronics tray.
(Cross-posted to Hackaday.io)
