Today was the first public appearance of my next rover project: Sawppy the Rover. Well, the local maker group SGVHAK has seen Sawppy from prototypes of individual parts, but this is the first time it was shown to people I didn’t already know.
The event was at JPL and Sawppy got to romp with its predecessors. The whole story starts with JPL’s Open Source Rover project serving as our baseline. In January, a team was formed from SGVHAK members to beta-test their assembly instructions and submit feedback. During the test/feedback/review process, I had the chance to talk with Eric Junkins of JPL. At some point Eric tossed out an idea that somebody might take this build-it-yourself rover concept in another direction and design a servo-powered, 3D-printed version.
After SGVHAK’s rover project was complete, Eric’s idea kept coming back up in my head. Eventually I decided that “somebody” will be me, so I started drawing up plans for a rover that uses servo-actuated wheels and 3D printed interconnects for extrusions. Thinking like an engineer, at first I turned that description into an acronym: SAWPIFE. But then I turned that into the name Sawppy to make it more approachable.
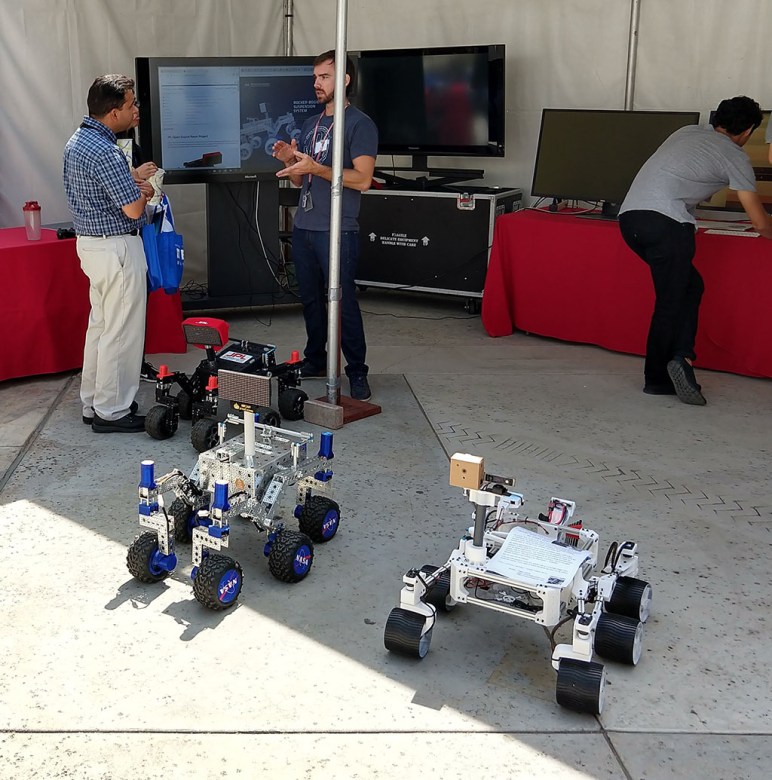
Here’s the rover lineup at JPL today: Eric is in the back (center) standing by his black & red rover. SGVHAK’s rover is the blue one in the middle, and Sawppy is the white rover sitting in the front right.
Today also marks the first public appearance of Sawppy online, albeit indirectly. I wrote up my construction technique for Hackaday.com and Sawppy served as cover model for that article. Sawppy is open for anyone to look over and maybe build their own, with its own Hackaday.io project page, Github repository and a public Onshape CAD document.
Over the next several days, this blog will detail adventures in building Sawppy the Rover.
