Right now my TurtleBot-based robot Phoebe is running around on a very rough first draft of chassis design. It was put together literally in an afternoon in the interest of time. Just throw the parts together so we can see if the idea will even work. Well, it did! And I’m starting to find faults with the first draft chassis that I want to address on the next version for a much better thought-out design.
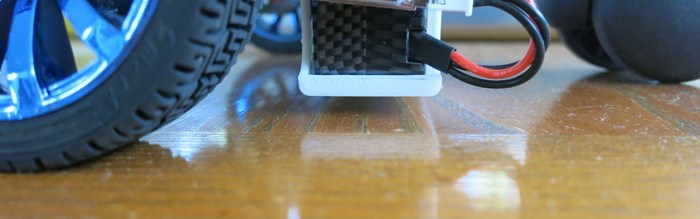
The first fault is the lack of ground clearance. When I switched my mentality from the rough terrain capable Sawppy rover to a flat ground TurtleBot like Phoebe, I didn’t think the latter would need very much ground clearance at all. As a result, Phoebe’ battery pack hung between the driving wheels and caster, with only a few millimeters of clearance between the bottom of the battery tray and the ground.
If I’m not climbing rocks, I asked myself, why would I need ground clearance?
Well, I’ve found my answer: my home has rooms with carpet, rooms with linoleum, and rooms with tile. The transition between these surfaces are not completely flat. They’re pretty trivial for a walking human being, but for poor little Phoebe they are huge obstacles. Driving across the doorway from carpet to linoleum would cause Phoebe to get stuck on its battery belly.

“More ground clearance” is a goal for Phoebe’s next chassis.
(Cross-posted to Hackaday.io)
