Phoebe was built to roam my house, but the first draft chassis was unable to do so effectively due to a few problems that the second chassis aimed to solve. The first one was ground clearance, which was solved by raising the main chassis and sloping the bottom of the electronics tray. Sloping that leading edge gives Phoebe a better approach angle for smoothly transitioning between floor surfaces.
The second major problem was the LIDAR scanner’s height: it was too high to see the legs of an office chair. Hence the other major goal of the second chassis was to lower the LIDAR mounting point and hopefully bring an office chair’s legs into plane of view.
Placing the newly rebuilt Phoebe next to the chair looks promising at first glance. Unlike the taller first chassis, the LIDAR’s horizontal plane of sight is now low enough it should be able to see the legs.

The proof is in the occupancy grid, and the RViz plot shows that Phoebe can now see the legs of the chair blocking its way.
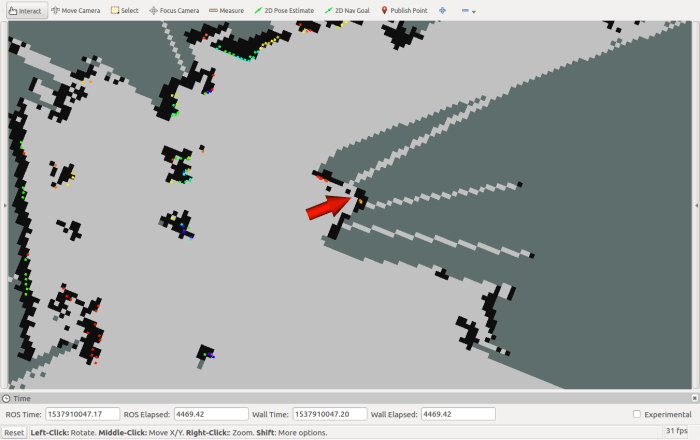
It’s not a very solid detection, though. Something about the surface texture and/or angle of the plastic results in a weak laser return. And there’s the risk of a leg going undetected when if approached from the end, as the dark sloped rounded end of the chair leg is nearly invisible to LIDAR.
But it’s a huge improvement from before, where the LIDAR was too high to see any part of the starfish pattern. It’s good enough for us to proceed with the next task: integrate Phoebe’s new faster wheel drive motors into the system.
(Cross-posted to Hackaday.io)
