Now that basic coordinate transform frames have been configured with help of URDF and robot state publisher, I moved on to the next document: robot setup page. This one is actually listed slightly out of order list item on ROS navigation page, third behind the Basic Navigation Tuning Guide. I had started reading the “Tuning Guide” and saw that, in that introduction, the tuning guide assumes people have read the robot setup page. It’s not clear why they are out of order, but clearly robot setup needs to come first.
Right up front in Section 1 “Robot Setup” was a very helpful diagram labelled “Navigation Stack Setup” showing major building blocks for an autonomously navigating ROS robot. Even better, these blocks are color-coded as to their source. White blocks are part of the ROS navigation stack, gray parts are optional components outside of that stack, and blue indicates robot-specific code to interface with navigation stack.
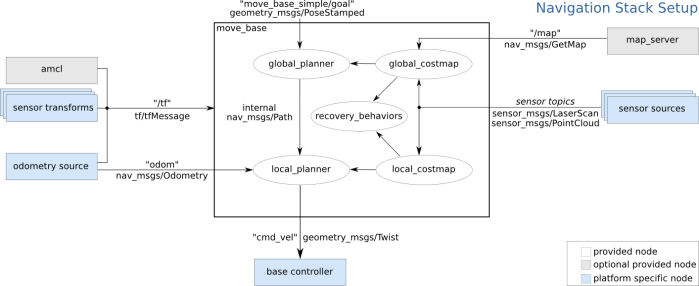
This gives me a convenient checklist to make sure Phoebe has everything necessary for ROS navigation. Clockwise from the right, they are:
- Sensor source – check! Phoebe has a Neato LIDAR publishing laser scan sensor messages.
- Base controller – check! Phoebe has a Roboclaw ROS node executing movement commands.
- Odometry source – check! This is also provided by the Roboclaw ROS node reading from encoders.
- Sensor transforms – check! This is what we just updated, from a hard-coded published transform to one published by robot state publisher based on information in Phoebe’s URDF.
That was the easy part. Section 2 was more opaque to this ROS beginner. It gave an overview of the configuration necessary for a robot to run navigation, but the overview assumes a level of ROS knowledge that’s at the limit of what I actually have in my head right now. It’ll probably take a few rounds of trial and error before I get everything up and running.
(Cross-posted to Hackaday.io)
