At the February 2019 meet for San Gabriel Valley Linux User’s Group (SGVLUG), Lan and I presented the story of rover building in our hardware hackers spinoff group a.k.a. SGVHAK. This is a practice run for our presentation at Southern California Linux Expo (SCaLE) in March. Naturally, the rovers themselves had to be present as visual aids.
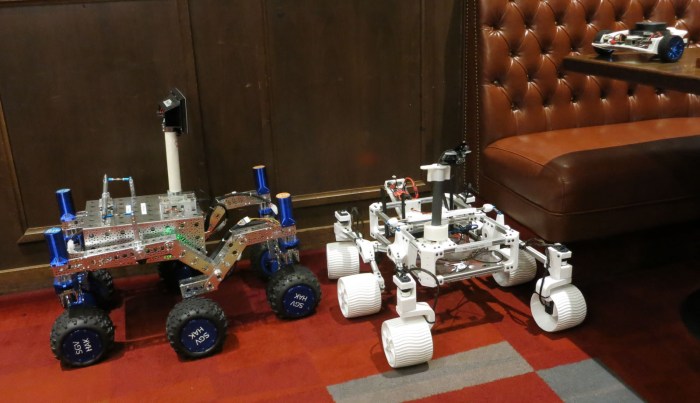
We started the story in January 2018, when Lan gathered the SGVHAK group to serve as beta testers for Jet Propulsion Laboratory’s Open Source Rover project. Then we went through our construction process, which was greatly motivated by our desire to have SGVHAK rover up and running at least year’s SCaLE. Having a rover at SCaLE was not the end, it was only the beginning. I started building my own rover Sawppy, and SGVHAK rover continued to pick up hardware upgrades along the way.
On the software side, we have ambition to increase sophistication by adapting the open source Robot Operation System (ROS) which led to a small digression to Phoebe, my tool for learning ROS. Getting a rover to work effectively under ROS poses some significant challenges that we have yet to address, but if it was easy it wouldn’t be fun!
Since this was a practice talk, the Q&A session at the end was also a forum for feedback on how we could improve the talk for SCaLE. We had some good suggestions on how we might have a better smoother narrative through the story, and we’ll see what we can figure out by March.

Hello. Your blog is awesome! I am in the process of buying components to build my own autonomous rover in order to learn ROS and Python. For your odometry-with-wheel-slip issue, I know aerial drones often get a lot of use out of optical flow.
One commonly used board that I am looking at with documentation. I haven’t started testing with it yet with my bot, but it seems reasonable:
https://www.amazon.com/powerday-PX4FLOW-Optical-Ultrasonic-PIXHAWK/dp/B01ESRXKI4
http://ardupilot.org/copter/docs/common-px4flow-overview.html
https://github.com/AlexisTM/aero-optical-flow-ros
Happy hacking!
-Scott
LikeLike