My motivation to learn about the BeagleBone Blue came from my rover Sawppy driving by the BeagleBoard foundation booth at SCaLE 17x. While this board might not the best fit for a six wheel drive four wheel steering rocker bogie mars rover model, it has a great deal of potential for other projects.
But what motivated the BeagleBone Blue? When brainstorming about what I could do with something cool, it’s always instructive to learn a little bit about where it came from. A little research usually pays off because the better my idea aligns with its original intent, the better my chances are of a successful project.
I found that I could thank the Coordinated Robotics Lab at University of California, San Diego for this creation. As teaching tool for one of the courses at UCSD, they created the Robotics Cape add-on for a BeagleBone Black. It is filled with goodies useful for robot projects they could cover in class. More importantly, with quadrature input to go along with DC motor output and a 9-axis IMU on top of other sensors, this board is designed for robots that react to their environment. Not just simple automata that flail their limbs.
The signature robot chassis for this brain is the eduMIP. MIP stands for Mobile Inverted Pendulum and the “edu” prefix makes it clear it’s about teaching the principles behind such systems and invite exploration and experimentation. Not just a little self-balancing Segway-like toy, but one where we can dig into and modify its internals. I like where they are coming from.
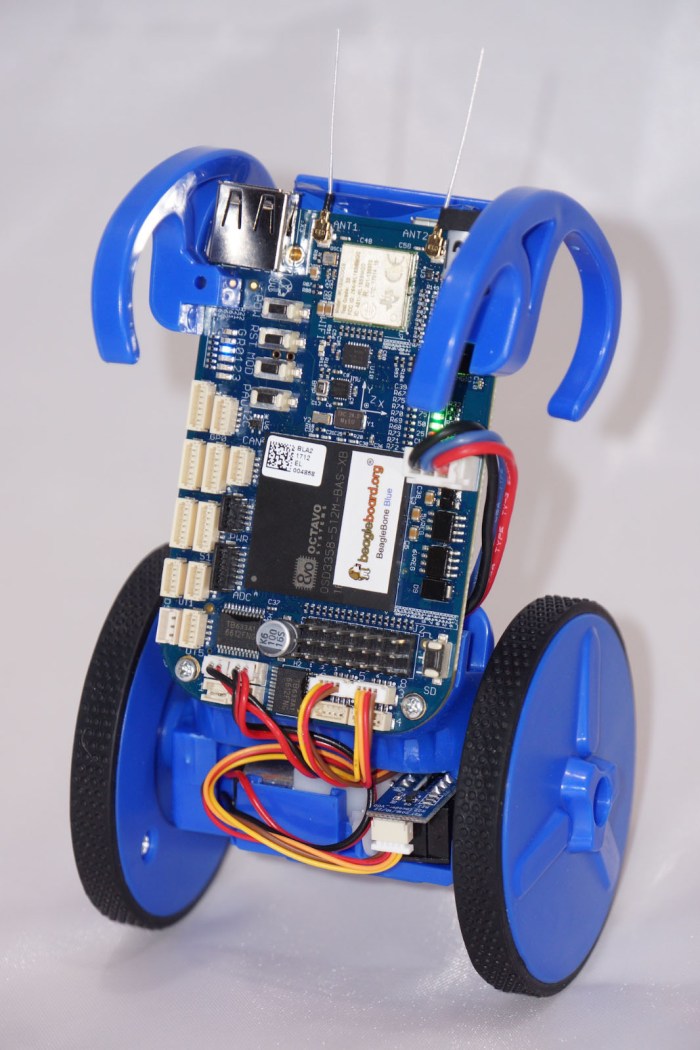
BeagleBone Blue, then, is an offering to make robots like an eduMIP easier to build. By merging a BeagleBone Black with the Robotics Cape into a single board, removing components that aren’t as useful for a mobile robot (such as the Ethernet port) we arrive at a BeagleBone Blue.
Of course, the brawn of a robotics chassis isn’t much use without the smarts to make it all work together. Befitting university coursework nature and BeagleBoard Foundation’s standard procedure, its peripherals software now called Robot Control Library are documented and source code available on Github.
I could buy an eduMIP of my own to help me explore the BeagleBone Blue, and at $50 it is quite affordable. But I think I want to spend some time with the BeagleBone Blue itself before I spend more money.
