ROS is a big world of open source robotics software development, and it’s hard to know everything that’s going on. One thing I’ve been doing to try to keep up is to read announcements made on ROS Discourse. I’ve seen various mentions of Autoware but it’s been confusing trying to figure out what it is from context so today I spent a bit of time to get myself oriented.
That’s when I finally figured out I was confused because the term could mean different things in different contexts. At the root of it all is Autoware Foundation, the non-profit organization supporting open source research and development towards autonomous vehicles. Members hail from universities to hardware vendors to commercial entities.

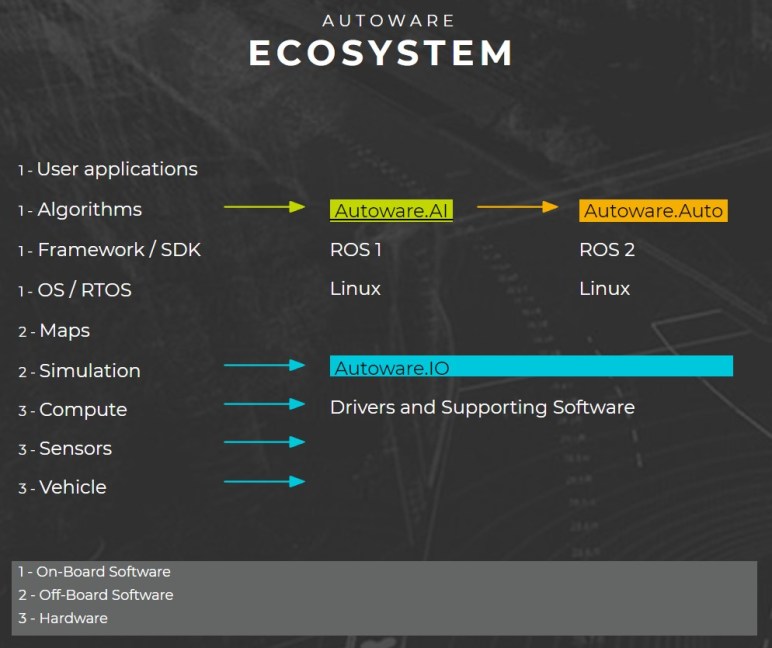
Under the umbrella of this Autoware Foundation organization is a body of research into self-driving cars using ROS 1.0 as foundation. This package of ROS nodes (and how they weave together for self-driving applications) is collectively Autoware.AI. Much of this work is directly visible in their main Github repository. However, this body of work has a limited future, as ROS 1.0 was built with experimental research in mind. There are some pretty severe and fundamental limitations when building applications where human lives are on the line, such as self-driving cars.
ROS 2.0 is a big change motivated by the desire to address those limitations, allow people to build robotics systems with much more stringent performance and safety requirements on top of ROS 2.0. Autoware is totally on board with this plan and their ROS 2.0-based project is collectively Autoware.Auto. It is less exploratory/experimental and more focused on working their way towards a specific set of milestones running on a specific hardware platform.
There are a few other ancillary projects all under the same umbrella working towards the overall goal. Some with their own catchy names like Autoware.IO (which is “coming soon” but it looks like a squatter has already claimed that domain.) and some without such catchy names. All of this explains why I was confused trying to figure out what Autoware was from context – it is a lot lot of things. And definitely well worth their own section of ROS Discourse.
