Strictly speaking, it was not critical to add a shelf for the little laptop used to control everything, but it is very nice to resolve the constant irritation of pausing what I wanted to do just to find a place to set it down. It should speed up future tinkiering of this machine, and the next step in that process is to wire up Z-axis capability.
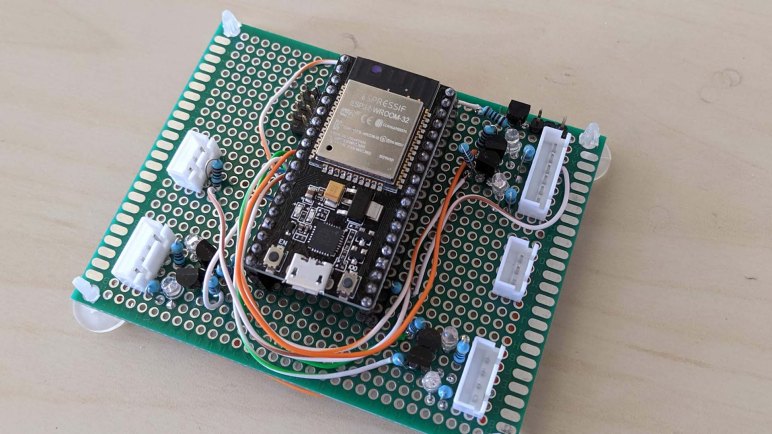
In hindsight I should have packed the X (lower left) and Y axis (lower right) components a little closer together, but learning these lessons this is why we build prototypes. There isn’t quite enough room to duplicate the same pin layout for Z in the upper right, but then again, I don’t really need to. I’m not interfacing with an existing Parker Motion Control product, the Z-axis will be different.
As a result, the JST-XH connectors have been simplified from a 4+3 arrangement to a single 6-pin arrangement. 4 of the pins are the same: a pair of open-drain signals for step and direction. The remaining two pins are for a normally-open switch to home the Z axis stepper control.
But there’s another twist to the Z-axis: a feature of Grbl ESP32 is the ability to use a RC hobby servo for any axis. It requires changing a few #define in the source code and recompiling, something I could do on the little laptop who now has a shelf. I thought a servo-actuated Z-axis would work well as a first test of system functionality, before I go through the effort of building a more functional stepper-controlled Z axis.
But I couldn’t use the same pin for both, because an open-drain circuit is the wrong way to send a control signal to a servo. Instead, a separate transistor was rigged up so the ESP32 control signal (3.3V) can emit a 5V servo signal. The signal pin and ground are exposed via a separate 3-pin header.
The 5V source for the control signal came from the USB port connected to the little laptop. Ideally there’ll be some opto-isolation for the control signal, but this will suffice for a prototype. However, it will not be enough to power the servo motor, which will require its own power source.
