One of my early 3D printing projects was motivated by the wasteful battery usage of a cheap Harbor Freight digital caliper. I didn’t want to replace its LR44 battery all the time, and I didn’t want to directly modify the caliper in any way, so I ended with an overly complex tray to hold a AAA battery in place of the default LR44 battery.
The main goal was to avoid the wastefulness of burning through LR44 batteries, and that goal was a success. I was able to use cheaper AAA batteries and use them for longer. In fact, this caliper was able to run on AAA batteries that were too weak for much else, giving them a very useful secondary life. However, my battery tray suffered poor reliability of electrical contact points. In actual usage it was too easy to move a component just enough to break electrical connection, resetting the caliper and losing whatever measurement I had at the time. After a few frustrating episodes, I broke off the plastic head substituting the LR44 battery and soldered wires directly.
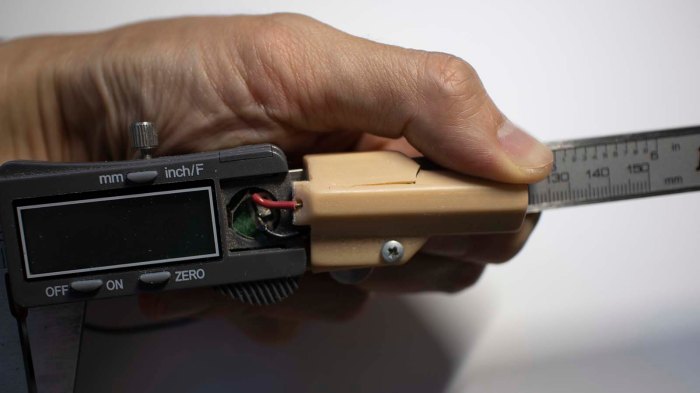
After years of use, the battery tray I designed and 3D printed finally cracked. And this time around I decided to go for simplicity instead: a commodity AA battery tray held to the back side of my caliper with double-sided foam tape.

Wires from this battery tray were soldered directly to the battery tabs inside my caliper for reliable operation. I could no longer lay this caliper down flat on a table, but I don’t think that will be a significant concern. I’ll know for sure after some usage and if it proves to be a problem I will re-evaluate.
In the meantime, I have a replacement battery tray allowing me to run my caliper on weak AA batteries already destined to be thrown away. And since this tray is a mass produced commodity item, using it was cheaper and it was faster to install than my previous solution.
Moral of the story: sometimes 3D printing is not the answer.