
Before I dive headfirst into designing a project around hypocycloid drives, I thought I should first try the low-effort test of printing up an existing design to see how it works. If it does, I get to see a printed hypocycloid drive in action. If it fails, I have data points on how to (and maybe not to) 3D print a hypocycloid drive.
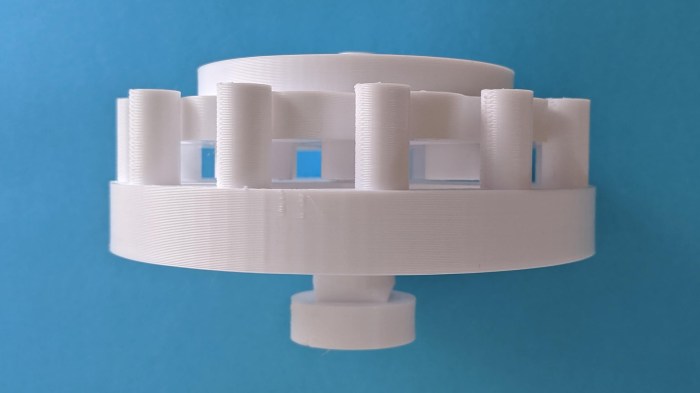
Lucky for me, the very same site hosting a hypocycloid gear calculator also has a ready-to-print set of STL files for a 3D-printable hypocycloid speed reducer model. It looks like a nifty little hand-cranked demonstrator, so I fired up my 3D printer to print one of each STL. I noticed a lot of little artifacts on component mating surfaces. I was eager to see it in action, so I did only minimal cleanup with a blade before proceeding.

One instance of theory not meeting reality was in the crank handle. The geometry was designed such that the outer grip could rotate around a center shaft. They are printed in a single piece but there’s a gap allowing the outer trip to break free and rotate about the center shaft. I’ve done this sort of designed breakaway before, but this one didn’t work well for me and it broke off at the wrong place, on the inner shaft instead of the outer handle. Oops.
Upon assembly I noticed a big gap, and some parts were falling out of place. It didn’t take long before I realized there were two components (a cam and a disk) where I needed to print a second unit, rather than printing just one as I had done.

Once both disks were in place the overall system friction went up dramatically. Optimistically thinking they’re just small bumps that can wear down with a few cycles, I tried to power past the friction points. But instead of breaking through sticky portions, I broke the input drive shaft.
I asked to print another drive shaft on a more precise 3D printer. While it was printing, the device was taken apart to better clean up surface artifacts. Round 2 was far more successful, making a fun toy and sufficiently prove the concept for future experimentation.
