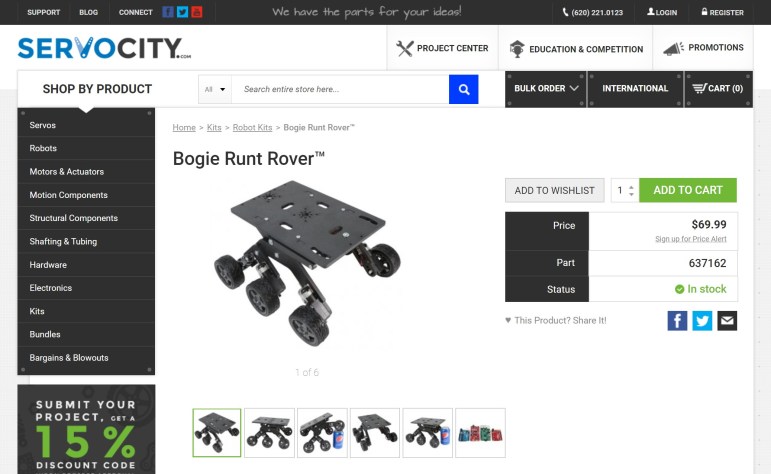
The littleBits Space Rover is a cute little thing, but with only two wheels it bears little resemblance to real life Martian robot explorers. Moving a little bit higher on the fidelity scale, there are some robots out there with six wheels arranged in a rocker-bogie geometry. A representative of this breed is the ServoCity Bogie Runt rover.
Browsing the ServoCity web site, it appears that the Bogie Runt is the largest and most complex (so far?) of their line of “Runt Rover” chassis kits. Peewee, Sprout, and Zip Runt Rovers are two-wheel differential drive chassis like the littleBits Space Rover. Then there are the Junior, Half-Pint, and Whippersnapper Runt Rovers which roll on four wheels. The Bogie Runt is the only one with six wheels, and the only one with an articulating suspension system.
On ServoCity’s “Robot Chassis Kits” page they are all listed under “Smooth Surface.” This is certainly true for all the other Runt Rovers, but the Bogie Runt should be able to handle rougher terrain thanks to the rocker-bogie suspension system. It’s not obvious if the smooth surface classification for Bogie Runt was a mistake, or if it was deliberate based on information not immediately visible from just window shopping.
All of the Runt Rover kits appear to be made by laser (or possibly waterjet) cutting of flat materials, likely some type of plastic. They have bolt patterns to connect with ServoCity’s Actobotics build system which is mostly aluminum. Actobotics is very popular with FIRST Robotics participants and because of that, it was also the build system selected for the JPL Open Source Rover.
But that also causes a problem I have with the Bogie Runt: Actobotics is based on Inch dimensions and thus problematic for use outside of the United States. Sawppy is metric and, for worldwide compatibility, I plan to keep all derivatives and descendants metric.
Another shortfall of Bogie Runt is the lack of corner steering mechanisms. It is thus constrained to differential drive (a.k.a. “Tank Steer”) which works very well for two wheels but precision drops as the number of contact patches go up. In my experience, differential drive is marginal for four wheels, and behaves unpredictably with six. It was a tradeoff the Bogie Runt Rover product made against cost and complexity, leaving room for improvement and motivation for me to keep looking.
