Micro Sawppy Beta 1 (MSB1) is the test chassis I built to verify I could miniaturize concepts of my Sawppy rover down to a smaller simpler version built around micro servos. This tour of MSB1 starts at the bottom where the rubber plastic meets the road dirt. These wheels were a simplified version of Sawppy wheels, keeping the 48 grousers inspired by Perseverance rover’s wheels. The six wheels spokes don’t conform to the shape of the real thing, because that required multiple pieces made with 5-axis CNC machining and I wanted a design that is 3D-printable in one piece. But I did keep the curved spiral that also contributes to shock absorption, something also present in bigger Sawppy wheels.
I tried to carry over Sawppy’s wheel axle design, where a metal shaft is responsible for shouldering all the weight of the rover, helped by a few ball bearings. This freed the LX-16A serial bus servos from structural load duty, letting them focus on their job of turning the wheel to drive the rover forward/back. Unfortunately I couldn’t figure out a good way to scale down that design without inheriting all the problems.
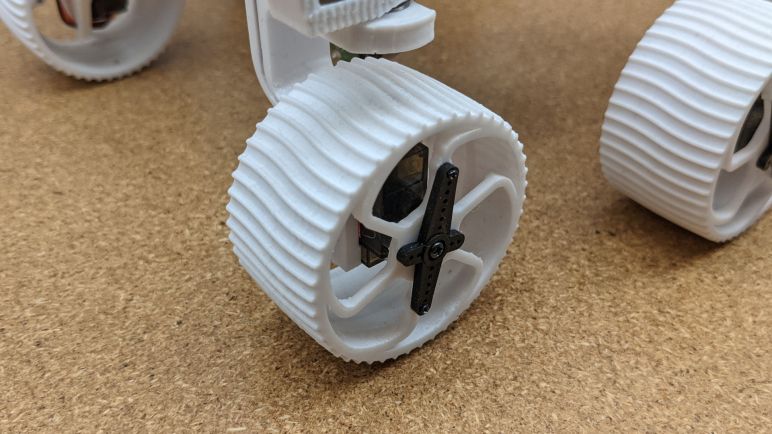
Thus these wheels were mounted directly to the servo horn via some self-tapping M1.2 screws. Those fasteners were from an assortment kit of small self-tapping metric screws I found on Amazon (*) but I’m worried whether they are commonly available worldwide.
Fastening the wheels directly to servo horns meant the micro servo gearbox will have to shoulder weight in addition to their responsibility for driving the wheels. This force will be applied perpendicular to its axis of rotation and the micro servo gearbox isn’t optimized to handle that type of force long term. As an attempt to mitigate this, I decided to mount the wheel on the inside surface of the horn, shortening the lever arm by a few precious millimeters.

Despite my misgivings about this design, I decided to forge onward. Perhaps a micro rover is lightweight enough that gearbox wear would not be an issue, and building this prototype will tell me if there were other unforeseen problems with this approach. Before I can drive a rover with these, though, I’ll need to convert them from position control actuators into continuous rotation servos.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
