I had decided to use micro servos, converted to continuous rotation, to drive the wheels of my micro Sawppy beta 1. (MSB1) The next challenge was to design a way to steer the four corner wheels.

Given my fixation on using ball bearings to shoulder workloads in rover designs, it shouldn’t be a huge surprise that the first thing I worked on was a method to incorporate a ball bearing into my design.

Mounted at the bottom of a suspension arm with a single M3 screw into plastic, it will bear the weight of the rover and define this corner’s axis of rotation. It will also become the fulcrum for any lateral wheel movements pushing against the steering servo.

In consideration of these forces, the servo horn sits at the top of the steering assembly to maximize length of lever arm and minimize stress on servo gearbox.
I oriented the servo such that the wires are pointing towards the body. This seemed like the obvious choice for wire path management. And given that servo wires exit at varying locations from one micro servo manufacturer to the next, I had to design a “funnel” to accept a range of wire positions.

A consequence of this decision is that the steering knuckle is quite wide in order to give enough clearance to the body of the servo. This consumes precious space in such a tiny rover. At the rear of the rover, I wonder if this will clear the body.

At the front of the rover, it limits the amount of space available for a rover robot arm. This front view picture shows the steering knuckle is taking up almost a third of the width between steering servos.
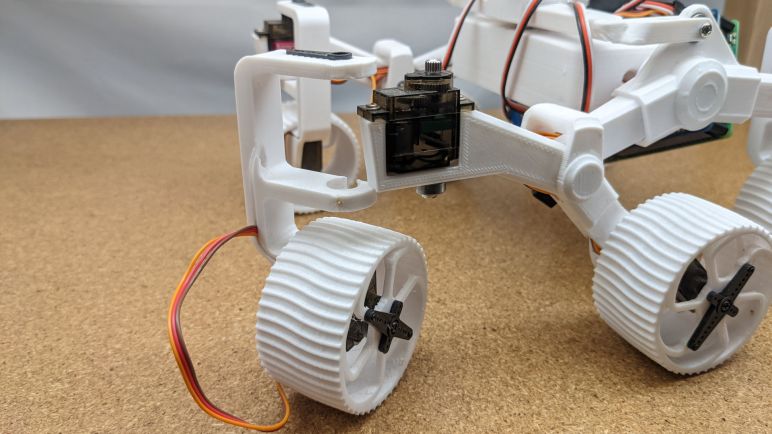
Fortunately, I could shape the structure to minimize impact on wheel ground clearance. These wheels are quite happy to climb over obstacles with little risk of collision with the steering knuckle body. Which is one less thing to worry about as I moved on to designing the suspension bogie for MSB1.
