The robot arm I built as a test mockup for my little rover Micro Sawppy Beta 2 (MSB2) was a simple manually-posed affair. I wanted to get a better feel of how such a thing would articulate before I put in the work to motorize it, and I had no suitable actuators on hand anyway. In fact, I had no idea what I would use for such a project, since I found problems with the micro servos I’m already using in this project.
There are a few robot arm designs built around the same small affordable micro servos. For example, the MeArm is a super minimalist robot arm designed to be assembled from laser-cut pieces. I’ve seen a few MeArm in person and based on how they moved, I could tell there are some challenges to use them effectively. One problem I witnessed was that, under certain circumstances, a particular servo would get into an oscillation bouncing on either side of the target position. Unable to ever reach that position and hold it steadily.
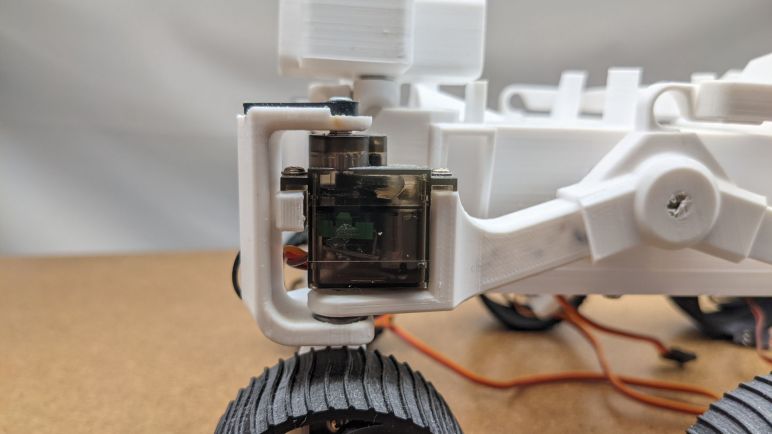
I built and ran MSB1 without seeing such behavior and had been feeling pretty good about things, but MSB2 used a different batch of micro servos from a different manufacturer. With this batch, I saw the same oscillation I saw on a few MeArm affecting MSB2 steering and I think it’s coming from certain servo control boards. Or at least I don’t see how it could be caused by my mechanical design changes between MSB1 and MSB2.
The comments on my tweet support my hypothesis: this batch of micro servos have some shortcomings in its feedback control logic to cause this behavior. I think it is very likely a deliberate engineering tradeoff decision dropping some feature to make it cheaper, given that these micro servos were built to minimize cost. There were multiple suggestions to add damping which does indeed mitigate the problem. For MSB2, this oscillation only occurs when I hold the steering mechanism up in the air. Once I set down the wheel, friction between wheel and ground adds enough damping to stop the oscillation.
I’m feeling particularly irritated at this servo behavior, because it turned my beloved feature into a bug: the smooth low friction rotation enabled by ball bearings is a contributing factor for this oscillation. If I didn’t use ball bearings and had high friction steering, this oscillation would probably not happen. But annoying as this was for steering, it became a disaster for driving.
