Getting a pair of bearings aligned with the wheel contact patch is a feature on all Sawppy rovers, so that in itself wasn’t new. But Micro Sawppy Beta 3 (MSB3) did try a new way to mount bearings, and I’m optimistic it’ll make future Sawppy designs easier to build. On top of that steering joint, I’ve also modified the servo attachment for another feature I wanted to put on my rover designs: mechanical steering trim adjustment.
Sawppy V1 had a software-based trim adjustment system, where the center point of each steering servo could be adjusted by modifying a value in a text file. I though it was something that I could set once and forget but I was wrong. The potentiometers used to sense position inside a servo motor drifts over time (and temperature, and humidity, and phase of the moon…) so in reality steering trim had to be adjusted fairly frequently.
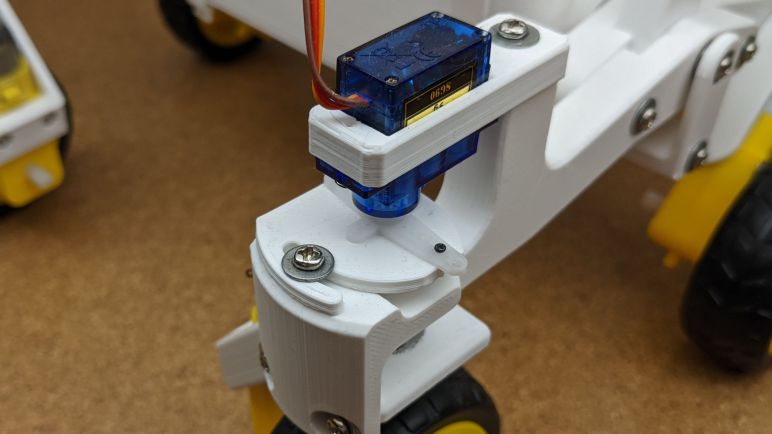
For MSB3 the servo horn bundled with a micro servo is mounted on a 3D-printed piece with an arched hook in the front. I could then fasten it to my steering assembly with a single screw. Steering trim adjustment becomes a matter of loosening that screw, sliding to a different point within that arc, and tightening the screw back down.

Another advantage of this design is that, unlike MSB1 and MSB2, the servo is freed from handling any structural loads. It is now responsible solely for steering just as servos were for Sawppy V1. It is a feature I’m glad I could bring to a smaller scale. I thought about going one step further on ease of assembly, and tried a few clip-on servo mounting brackets for tool-less assembly and replacement. (Pictured.) But even though these little servos assert little torque, there is enough to distort 3D-printed plastic and affect steering accuracy so I returned to the concept of a screw-down servo bracket.
But the experience did remind me of one thing about Sawppy V1: I didn’t like using heat-set inserts on shaft couplings because they would slip and break. However, that slippage and breakage did have an advantage when Sawppy is stressed beyond design limits. When a child decided to break my rover, the coupler broke before that abuse was transmitted into the servo. What would happen to this little rover servo?
