The weakest point in my Sawppy V1 rover were its shaft couplers, but that bug also became an accidental feature: when the system is abused, being the weakest link meant it is a sacrificial element to break before anything more expensive would. I am now designing the servo steering mechanism for Micro Sawppy Beta 3 (MSB3) and wanted to know: do I also have an (accidental) abuse-absorbing feature on the little rover?
This was something fairly easy to test and, thanks to the low cost of SG90 plastic gear micro servos, I was willing to sacrifice one for this knowledge. I put together a MSB3 prototype steering assembly and wired the servo to power and control signal, telling to hold straight center. If I wanted to be scientific I would use a torque wrench or something to quantify the forces as I test, but I didn’t have the proper equipment so I just used my hand.
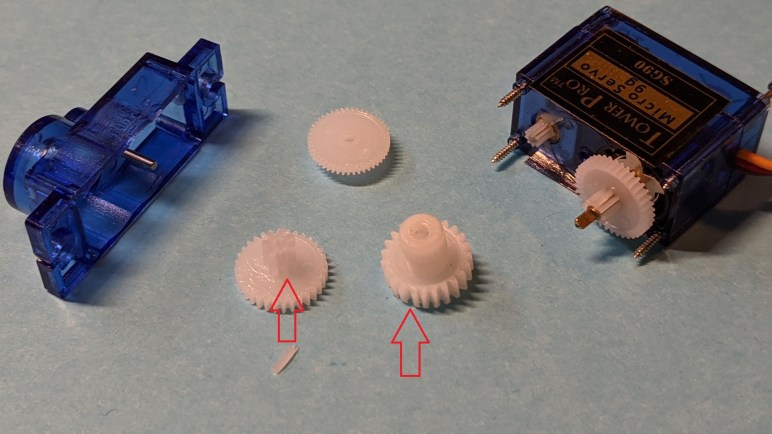
The answer is no, nothing else in this steering assembly for MSB3 will step up and absorb abuse on behalf of the steering servos. It took surprisingly little force from my wrist before I heard something snap. I disassembled the gearbox to see not one but two failures: A tooth is bent (but still attached) on the final output gear, and another tooth has broken off from the adjacent meshing gear.
Since I didn’t use an instrument to quantify the breaking force, I don’t have objective numbers to post here. Subjectively I felt the breaking point was beyond what I would reasonably expect from a little rover in normal roaming, which is good for rovers rolling along minding their own business. But I want micro Sawppy to be something a teacher can introduce to their class, and I didn’t think the breaking point was beyond the capabilities of curious/destructive children, and so the fragility worries me.
I’m sure MG90 metal gear servos would fare better, but would they be strong enough? I’ve already sacrificed a few MG90s to experimentation and I’ll want to set up proper instrumentation before I sacrifice another. And obviously a MG90 is more expensive than a SG90. Is it better to use affordable SG90 servos and replace them as needed? Or is it better to go straight to MG90 for higher durability? Answering this question definitively would require real world usage data. See how often SG90s require replacement, and whether the replacement rate is greater or less than the up front-cost increase of using MG90 servos. In order to obtain this real world usage data, I’ll have to keep working on the rest of the rover.
