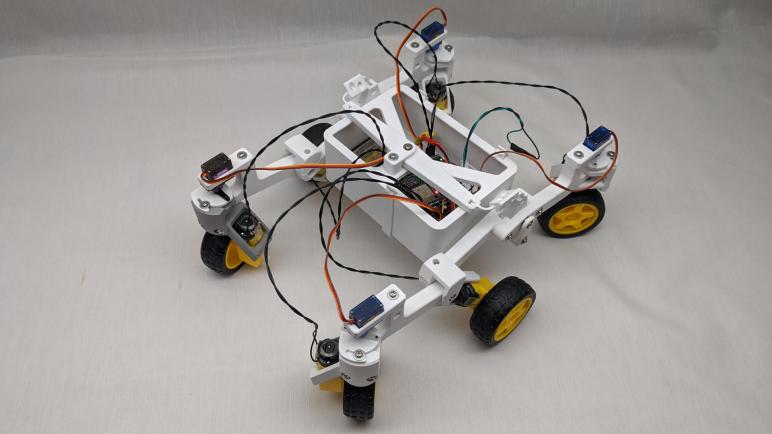
I wanted to reduce the cost of a micro Sawppy rover by using a HTML-based WiFi control system. This allows control by any web-enabled device like touchscreen phones that many people already carry. However, since it would be against the cost-reduction theme to require expensive new flagship devices, I’m aiming at the opposite end of the spectrum: if people don’t want to use their everyday phone, they should be able to use their old retired phone for rover driving duty. As a representative example for development, I will be using my old Nokia Lumia 920 running Windows Phone 8 (updated to WP8.1.)
Microsoft stopped supporting these phones in 2017, which includes shutting down their app store. (Which never grew to the scale of iPhone or Android app stores.) Any new functionality would thus have to come in via its mobile-optimized version of Internet Explorer. Which, by accounts of the day, made a respectable implementation of web standards of the era. Unfortunately, mobile sites of the time were too frequently written explicitly for Safari on iPhone or Chrome for Android. Mobile-friendly web standards existed at the time and was supported by all the platforms, but not yet as widely adopted by sites as they are today. This was a problem that also hampered Firefox’s attempt at a phone OS.
Since this is not an iOS device, nor an Android device, I expect any web-based code that runs on IE for WP8 would be neutral and will run across many older devices. Or if they do not, at least I hope starting from this neutral ground means any necessary modifications would be minimal.
I actually had the intention of making my original SGVHAK rover code friendly to old phones as well, which was part of why I adopted jQuery on the client-side. It is a relatively old HTML framework, which I thought would give me the best chance of working on older phones. So when it failed to work reliably on my Lumia 920 I was grumpy! But I didn’t understand enough about these frameworks (Flask on the server side, jQuery on the client side) to debug what went wrong. This time I will start at a more fundamental level and build upwards, testing on my Lumia 920 as I go. Which meant I would greatly benefit from setting up an environment that will let me experiment and iterate quickly.