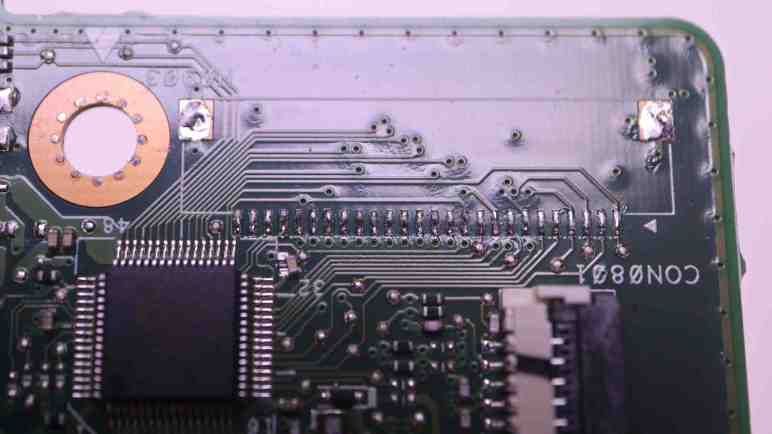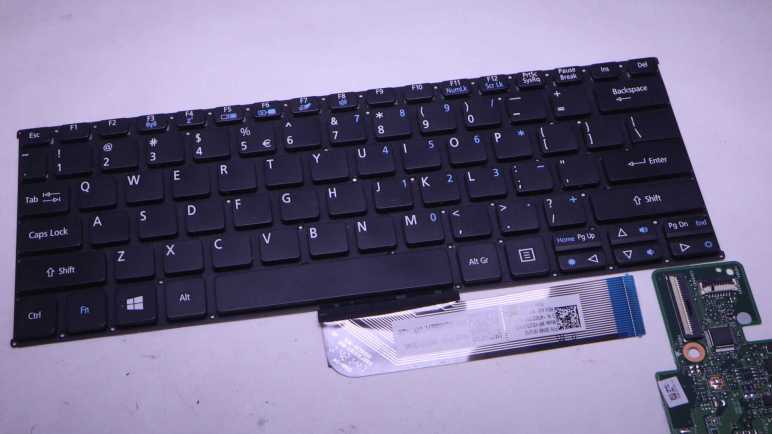
Right now I’m playing with the keyboard module salvaged from a dead Acer Aspire Switch 10. A CircuitPython program running on a Raspberry Pi Pico helped decipher its matrix layout, much more quickly than it would have been for me to figure it out manually with my multi-meter. To test this information, the obvious next step is to turn this into an actual USB HID keyboard. Since I’m already in the realm of CircuitPython, I followed Adafruit’s link to KMK firmware. KMK was written in CircuitPython which means I don’t even have to re-flash the runtime on my Raspberry Pi Pico, I could just change my code.
There are several ways to declare my keyboard matrix, most of the predefined KMK configuration files used the coord_mapping capability to give the keyboard layout in source code a rough resemblance to its physical layout. It’s nice for user-friendliness and ease of customization, but I’m going to skip that step for my initial test. I decided to go with the straightforward keymap list which is strictly in electrical matrix layout, paying no attention to its physical layout. This was easy for me because I had already built the table earlier so I just need to translate it into KMK CircuitPython code:
keyboard.col_pins = (board.GP12,board.GP13,board.GP14,board.GP15,board.GP16,board.GP17,board.GP18,board.GP19)
keyboard.row_pins = (board.GP1,board.GP2,board.GP3,board.GP4,board.GP5,board.GP6,board.GP7,board.GP8,board.GP9,
board.GP10,board.GP11,board.GP20,board.GP21,board.GP22,board.A0,board.A1)
keyboard.keymap = [
#12 13 14 15 16 17 18 19 Keyboard pins
[KC.NO, KC.UP, KC.NO, KC.NO, KC.NO, KC.DOWN, KC.ESCAPE, KC.NO, # 1
KC.BSPACE, KC.DELETE, KC.RBRACKET,KC.QUOTE, KC.NO, KC.NO, KC.NO, KC.ENTER, # 2
KC.PGUP, KC.NO, KC.BSLASH, KC.PGDOWN, KC.NO, KC.NO, KC.NO, KC.NO, # 3
KC.PSCREEN,KC.INSERT, KC.EQUAL, KC.LBRACKET,KC.NO, KC.DOT, KC.C, KC.NO, # 4
KC.MINUS, KC.PAUSE, KC.NO, KC.L, KC.M, KC.COMMA, KC.SPACE, KC.LEFT, # 5
KC.F12, KC.F11, KC.NO, KC.N9, KC.K, KC.J, KC.N, KC.O, # 6
KC.F10, KC.F9, KC.N8, KC.N7, KC.I, KC.H, KC.B, KC.U, # 7
KC.F8, KC.F7, KC.N6, KC.T, KC.G, KC.V, KC.NO, KC.Y, # 8
KC.F6, KC.F5, KC.N5, KC.E, KC.D, KC.F, KC.NO, KC.R, # 9
KC.F4, KC.F3, KC.N3, KC.N4, KC.S, KC.RIGHT, KC.NO, KC.W, # 10
KC.F2, KC.F1, KC.N1, KC.N2, KC.A, KC.Z, KC.X, KC.Q, # 11
KC.NO, KC.NO, KC.LSHIFT, KC.SLASH, KC.NO, KC.RSHIFT, KC.NO, KC.NO, # 20
KC.NO, KC.LCTRL, KC.NO, KC.N0, KC.NO, KC.NO, KC.NO, KC.NO, # 21
KC.LWIN, KC.NO, KC.NO, KC.P, KC.NO, KC.NO, KC.NO, KC.NO, # 22
KC.NO, KC.NO, KC.NO, KC.SCOLON, KC.RALT, KC.NO, KC.LALT, KC.NO, # 23
KC.GRAVE, KC.NO, KC.TAB, KC.CAPSLOCK,KC.WINMENU, KC.NO, KC.NO, KC.NO, # 24
# Special handling required for 19+24 = "Fn" ^^^^^
]
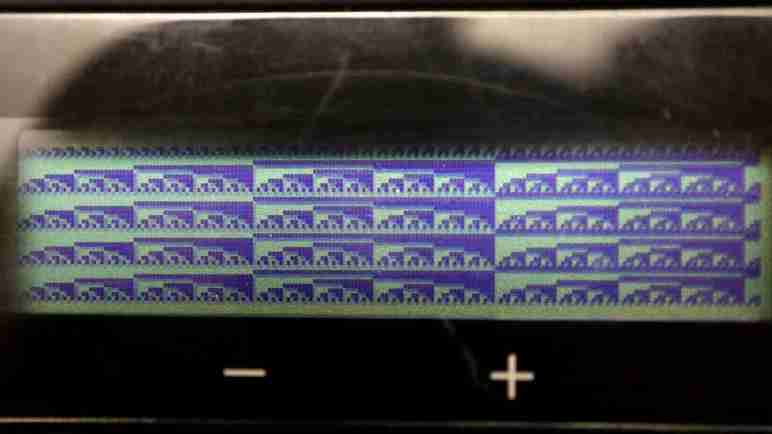
]With this key map, I have a functional USB HID keyboard. (I typed part of this blog entry on it!) This is pretty cool, but it only scratches the surface of what KMK could do. I haven’t fully implemented this keyboard, either. There’s a “Fn” key that activates additional functionality. Fn+F4 has a “Zz” printed on it, and I interpret that to mean putting the computer into sleep mode. I think KMK’s “layer” functionality is how I would go about implementing it, but I went looking for a way to signal sleep key and didn’t find a KC.SLEEP or equivalent. Without that, I don’t have much motivation to figure out layers. A related problem was if I put the computer to sleep, this KMK keyboard does not wake the computer from sleep. I would have to investigate and address that behavior before I can use KMK to help build, for example, a Luggable PC Mark III.
I’ll leave that for the future. I’ve accomplished today’s goal of proving I could turn this salvaged keyboard module into an USB HID keyboard, and I’m satisfied with my answer.

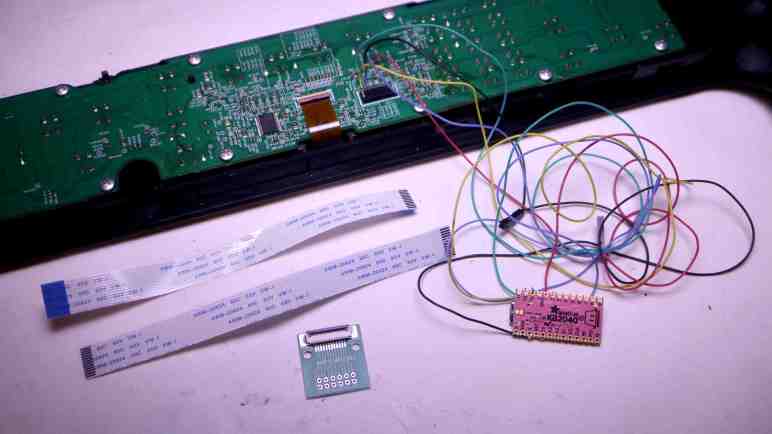
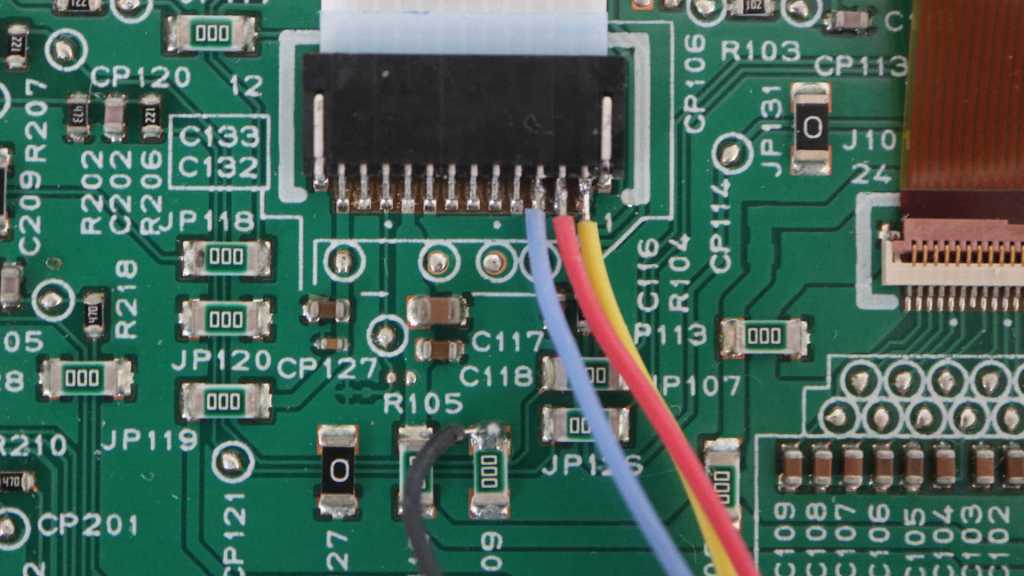
For this hypothetical future project, I assume I will need to build a more compact circuit to replace my jumper wire monstrosity. Maybe even a custom PCB to host both my keyboard connector and my RP2040? Its actual form factor will need be dictated by project needs, which I don’t know right now so I’ll leave things be. While there’s no guarantee I’ll stick with KMK firmware, either, it’s pretty likely as I’ve decided I like CircuitPython a lot.