Reorganizing my video game console area, I’ve decided to reorient my Xbox One X so it stands vertically to take up less table area. The console was designed to handle this scenario for the most part. There is even a designed hint on which side of the console to use: only one of the two sides is flat enough for standing. However, it is not quite as simple as turning the console on its side, because there is an open cooling vent grille on that side.

In order to elevate the console so air can still flow through those holes, a stand is needed. There are official stands available… but where’s the fun in that? I could 3D print something and there are several stands already on Thingiverse. But I didn’t think that was any fun, either. I much rather design and print my own, but how will my contribution be different? I focused on simplicity and print time. My design should be faster to print than the others.
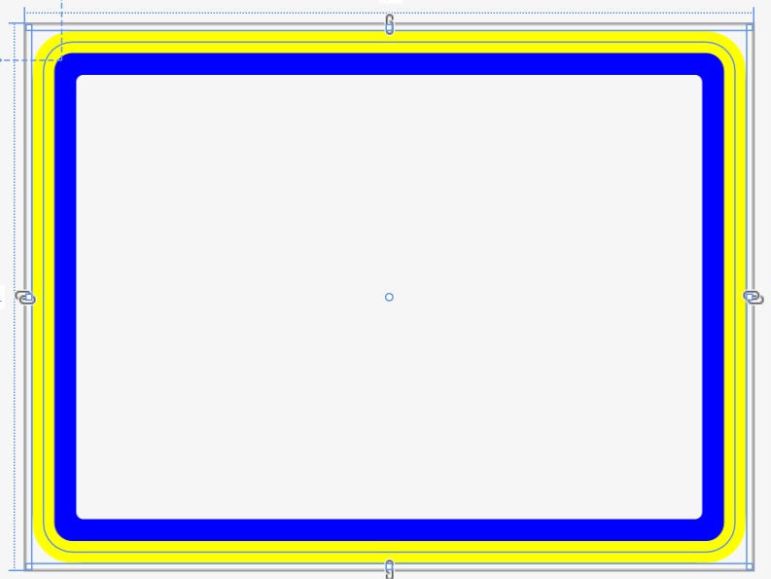
I focused on designing while keeping the print path in mind. It is one continuous curve that can be printed with only perimeters. No infill, no top layer, no bottom layer, no retractions. And no supports, either.

I will need to print two of them.

The installation position doesn’t have to be exact, since the grille doesn’t seem to be covering anything in a particular pattern that would require that I keep the nearby holes clear. I think it should be OK to flow around these feet.

The single loop design means the stand is not completely rigid but slightly flexible. The upside of this flexibility is that it will sit nicely on surfaces that are not perfectly flat. The downside of the flexibility is that the console may wobble a bit if bumped. Such is the tradeoff.

Now my Xbox One X can stand vertically without completely blocking its cooling intakes. If someone wants to tinker with this design, the Onshape CAD file is a public document here. If someone wants to use the design as-is, it has been published to Thingiverse.