Digitally laying out major components of a project in 3D space is something I’ve done for many projects, from my FreeNAS Box, to Luggable PC, to Sawppy the Rover. Doing it again for to figure out a more compact layout for Phoebe’s second chassis wasn’t a big deal in itself. However, this time the exercise will have a much more direct impact, thanks to a relatively new feature in Onshape.
For my past exercises, once I had decided upon a layout I would take measurements of relative position and dimensions of spaces between them. I would then copy those numbers to new drawings and build parts from those drawings. This workflow is functional but feels silly. The layout information is in the computer, why can’t I use them back in the drawings for components?
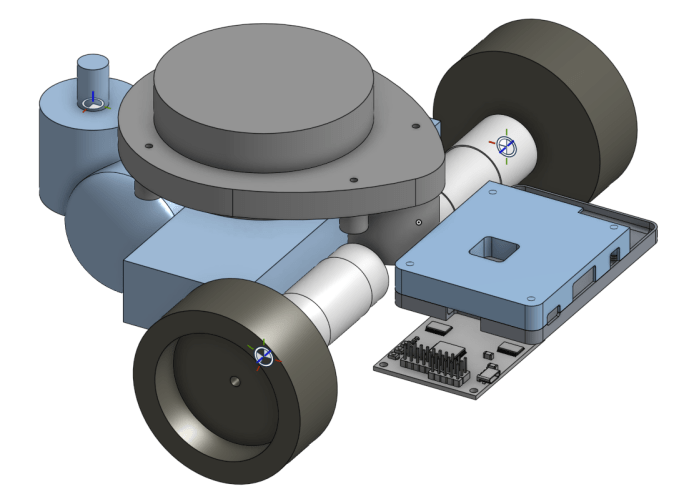
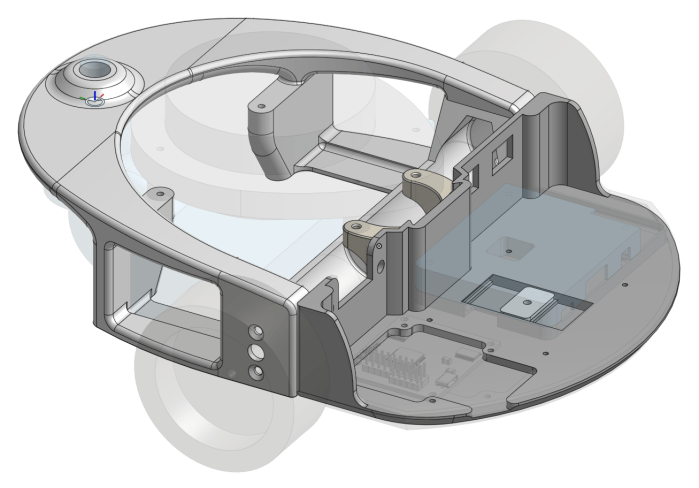
I’m not sure what the answer is, but whatever they may be, they are no longer relevant: modern CAD software now offer the ability to take assemblies of parts and use information from the assembly in drawings. They go by various names. SolidWorks documentation refers to this as top-down design. Onshape calls their version in-context modeling. Whatever the name, it’s a system that allowed me to reverse my design process. In the first chassis, I built a simple plate and bolt parts on it as I went. Now with the help of in-context modeling, I’ve arranged all the components in a game of 3D puzzle before creating a chassis to deliver that arrangement.
Using in-context modeling, I don’t have to copy & paste dimensions and risk introducing errors in the process. I also have the option to move parts around my layout and have all design dimensions update automatically. That last part doesn’t work quite as well as advertised, though I’m not sure what’s fundamental problem and what are just minor bugs they’ll fix later. But it works well enough today for me to believe in-context modeling will have a role in all my future projects.
(Cross-posted to Hackaday.io)