Phoebe’s first chassis was just a rough draft to get first hand exposure trying to get all the parts my TurtleBot variant needed to talk and work with each other. What that exposure taught me is I need to improve packaging space efficiency and create a much more compact robot. Only then could I satisfy the competing requirements of increasing ground clearance and lowering LIDAR sensor height.
To work on this puzzle in three dimensions, I started by holding parts up against each other. But I quickly ran out of hands to track all their related positions so I moved on to do it digitally. First I created 3D representations of the major parts. They didn’t have to be very detailed, just enough for me to block out the space they’ll need. Then they were all imported into a single Onshape assembly so I could explore how to fit them together.
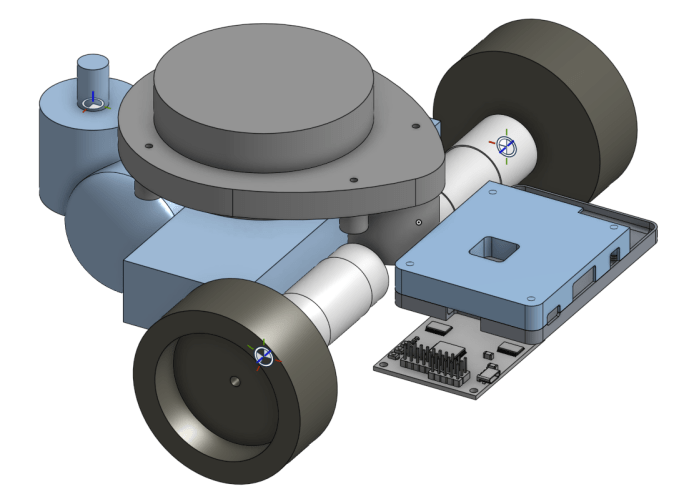
I turned the caster forward, as if the robot was travelling backwards, because that position represents the maximum amount of space it needs. My battery is the heaviest single component, so for best balance it needs to be mounted somewhere between the drive wheels and the caster. Relative to the first draft chassis, the battery was rotated to allow more ground clearance, but that also pushed the caster a little further back than before.
In the first chassis, electronic components like the Roboclaw motor controller and Raspberry Pi 3 were sandwiched above the motors and below the LIDAR. They’ve been moved to the front in order to lower LIDAR height. The lowest point of the LIDAR module – its spinning motor – was dropped in between wheel drive motors. This required turning the LIDAR 180 degrees – what used to be “front” is now “back” – but we should be able to describe that frame of reference by updating its corresponding ROS component transform.
(Cross-posted to Hackaday.io)
