 And now another entry in the “3D printer is not the solution to everything” file.
And now another entry in the “3D printer is not the solution to everything” file.
I’ve had ambitions to build my own delta robot ever since I watched an YouTube video of ABB FlexPicker industrial robots at work. Key part of the robot geometry is a set of parallel links and I thought I’d try printing my own.
The reason why I thought this exercise might be interesting is that 3D printer offers the unique possibility of printing objects in place. This means the socket can be designed purely to hold the ball in place, without any provision for the ball to be inserted or removed because there’s no assembly.
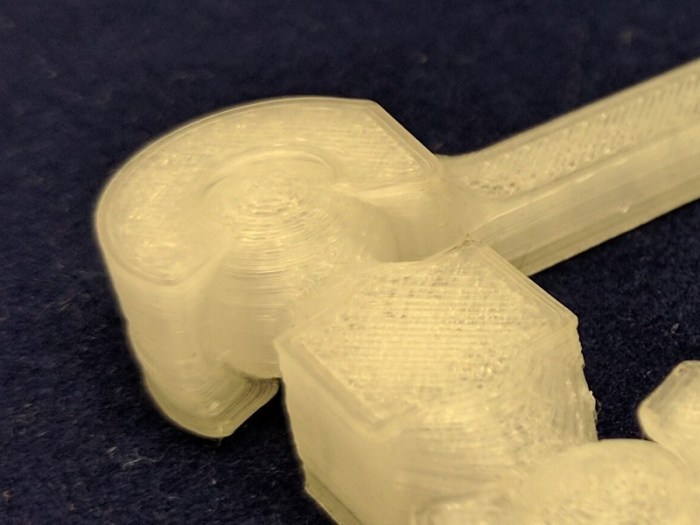
Drawing the test piece up in OnShape was fairly straightforward. A few prints were required to dial in the precise gap needed between the ball and socket so they print as tight to each other as possible without fusing together. Once that was figured out, I had a set of parallel links that moved very poorly.
On the upside, the theory was correct. The ball was printed inside the socket and was held tightly. It’s never coming out, because it never had to be inserted in the first place.
On the downside, 3D printers can’t (yet) print very smooth surfaces. Which resulted in rough movement as the printed layers moved past each other. Far inferior to standard polished metal joints, except maybe when they have sand and dirt inside.
Ah well, it was worth a try. If I want to build my delta robot, I will go buy some mass-produced ball-and-socket joints that’ll be much smoother than anything I can print with the 3D printer I have. Small projects can use joints from the remote-control hobby world, big projects can draw from the McMaster-Carr catalog.
