The SGVHAK rover wheels were a deviation from JPL’s baseline design, hence that’s where we started to get an early lead on any problems. As the baseline design is already proven, that could start later. The point of this exercise is to beta test the build instructions and evaluate their clarity and accuracy. Given it is still an early draft, there was a lot of room for us to offer suggestion for improvement. Sometimes the instructions alone left us bewildered, and we ended up going to the CAD file to see how pieces were intended to fit together. It helps, but the fact is we still have ambiguities that might cause problems down the line. The joy of being pioneering guinea pigs! Minor difficulties aside, the main metal frame is coming together mostly matching what the instructions dictated.

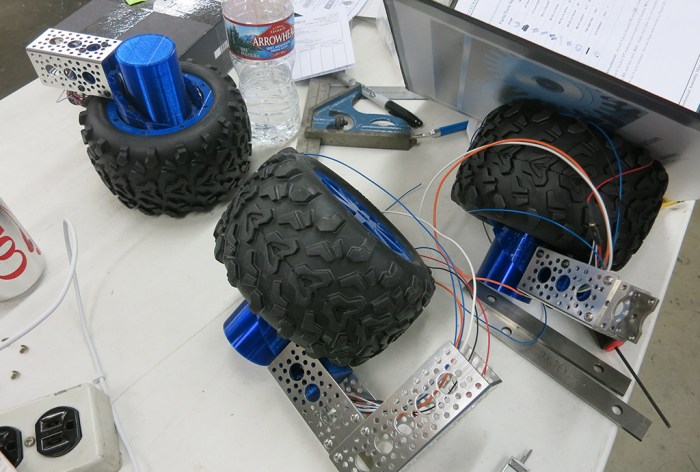
Since we’re doing our own wheels via 3D printing, we had to figure out where our changes blend in to the original design. Here are the wheel assemblies while we iterate on the integration.
The aluminum U-channel are pretty easy to work with and turned out to be far stronger than the expectation formed by looking at pictures. This should be one sturdy rover. The U-channels are also really easy to work with, for the most part roughly similar to IKEA furniture assembly. However, there were a few parts that needed more extensive work. Some of this work proved to be challenging. We needed a few short segments of aluminum rod with holes drilled through them. Even with the help of a vise clamping the rod on the work table of a drill press, movement crept in. The first attempt was not usable, it took a few tries to figure out the necessary technique.

