Once the rover was standing on its own wheels, we knew the majority of structure work is behind us. Not that we were close to completion – there were lots of details to finish up before the structure can be declared done. And it would have been naive to believe that the structure will perform flawlessly once assembly is complete – there were many problems that need fixing.
Once the structure work started ramping down with frame assembly, many other robot work can begin with a far better idea of the actual structure we’re building around. For example, it didn’t make a lot of sense to build wiring until we knew where we have space to route those bundles. It started with prep work – cleaning up rats nests and terminating components in connectors to make assembly easier. Here’s a before-and-after comparison picture.
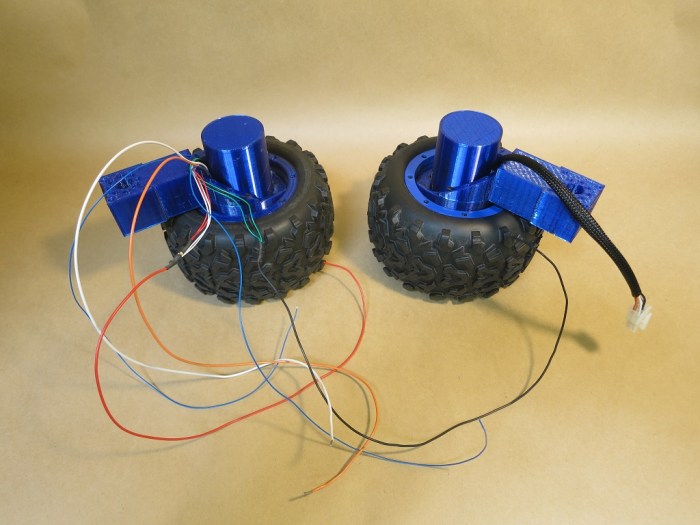
For the wheels specifically, we had the goal of making every wheel assembly interchangeable. Keeping all the wiring schema consistent makes it easier and less confusing to build, and allows us to build extra wheels on hand for quick replacement as needed. The only foil to this plan are the tires we’re using: the thread pattern is directional and has a recommended turning direction. The tires should work sufficiently well in either direction, but for the first draft we’ll put in the effort to align the tread patterns for cosmetic purposes if nothing else.
