
I had some design goals in mind for how the wheel should behave. Some portion should be flexible to absorb shock, and others places need to stay strong against different forces. In theory I could model this digitally, in practice it was more fun to 3D print them and feel how they act in the real world. A very crude suspension arm and motor mount was printed so some quick tests could be done.
There were three variables under adjustment. First is the thickness of wheel circumference. We want it to be rigid enough to support rover weight, yet soft enough to help wheel traction and absorb some shock. The second is the thickness of wheel spokes, with similar trade-off. Each spoke consists of a curved outer portion that’s intended to be relatively soft, backed by a straight portion that would be more rigid. The third variable is adjusting the size proportion between straight vs. curved.
A few different variants were printed to test how these variables affected wheel performance, and in hindsight this was premature. Adjusting these parameters is something that had to be redone after every significant change in wheel design, and there were some changes still to come.
The first major change was bearing location. This draft placed them in the center of wheel width, which turned out to be overkill and took up space. We would much rather allocate more space to the motor, which sticks out in this first draft. This protrusion risks colliding with obstacles the wheel could otherwise roll past, we much rather have the motor completely enclosed within the wheel.
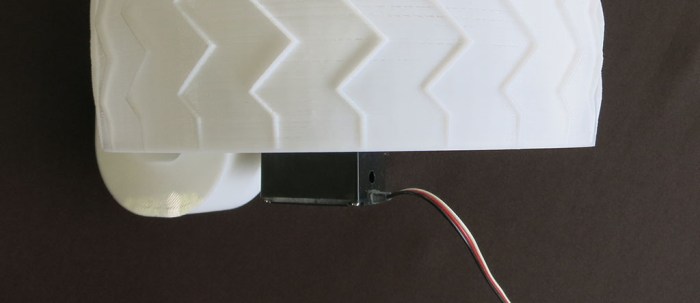
This motor is an old Parallax continuous rotation servo motor that was on hand. Its rated torque of 38 oz-in proved to be woefully under powered for driving a wheel of this size, but there’s no need to worry just yet. There are far more powerful servos available within price range for this project. Browsing Amazon I came across these digital servos (*), with a quoted torque of 20 kg-cm / 277 oz-in. That’s a good candidate to experiment with.
The second major change was wheel proportion. The diameter-to-width ratio is visibly different from Curiosity rover’s own wheels. Visual and mechanical fidelity is a priority in this project so this proportion – which has huge effect on wheel behavior – still needs to be changed.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
