When designing Sawppy the Rover‘s rocker-bogie suspension system, I wasn’t sure how strong the plastic interconnect parts needed to be. Once I had a rocker and a bogie connected, I could put some load on it in the real world. This physical experimentation showed the first draft was overbuilt. In the interest of reducing plastic filament usage and reducing print time, let’s slim things down a bit.
First draft interconnects held on to their aluminum extrusion beam over a distance of 50mm. This was reduced to 35mm which proved to be enough. Beyond reducing the length of extrusion bracket, the slim edition also makes the brackets thinner from 5mm to 3.5mm. Originally the 5mm thickness was intended for a 10mm M3 bolt to grab onto the extrusion tightly, but that under-estimated the thickness of our M3 nut installation tool. This oversight meant a 10mm M3 bolt hits the bottom of the rail before it can fully tighten against the bracket. By reducing to 3.5mm, we could use 8mm M3 bolts and they can tighten against the bracket without pushing against the bottom of the rail.
Shortening length from 50mm to 35mm and reducing thickness from 5mm to 3.5mm may not sound like much, but across all suspension components it cut print time and plastic usage almost by half.
The first draft rocker-bogie suspension was not thrown away, though. It was installed on the left side of the rover, and the second draft slim edition was printed mirrored so it could be installed on the rover’s right. It makes the initial chassis asymmetric and look a bit odd, but that’s fine. We can put up with a little oddness on our rover development chassis while we fine tune and polish.
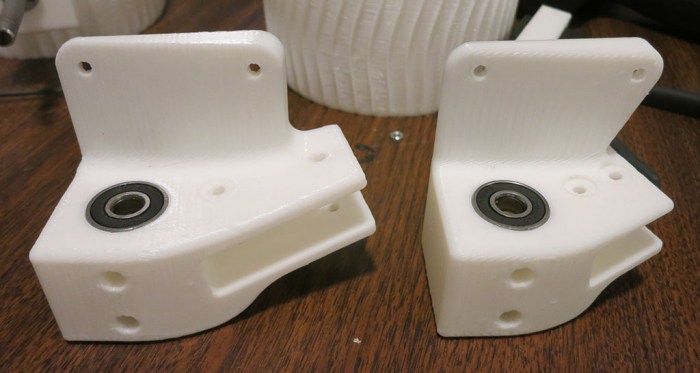
The overbuilt first draft suspension on rover’s left side was eventually replaced with slim components. Here’s a picture of the left front steering joint: overbuilt first draft on the left, slimmer second draft on the right.