Once Sawppy the Rover‘s wheel design was verified to work for basic operations, it’s time to push it to find its limits. The wheel is designed to be strong enough to hold up rover weight yet have flexibility to absorb shock. The shock absorption spokes tried to turn 3D printed plastic’s weakness (relative to metal) into a functional advantage instead. But plastic has its limits… how much will it take?
This was not a rigorous laboratory test. There are no instruments documenting the quantity and quality of forces involved. It was a low-tech test manually handling the wheel until something breaks. Push, prod, squeeze, twist. Level of forces applied gradually increased, venturing well beyond “normal use” levels and well into “abuse”. Eventually I tried pushing the wheel from above and, using body weight, gradually increased pressure until a loud crack was heard.
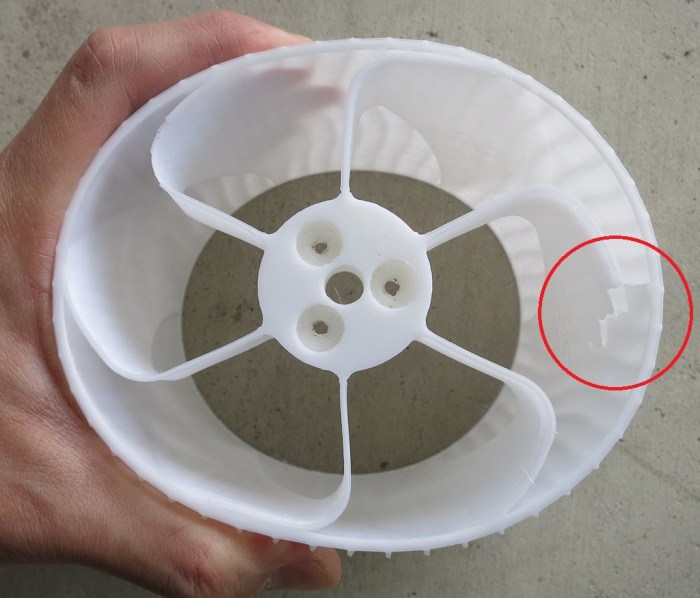
What finally gave way was one of the spokes near where it joined the wheel circumference. This joint was designed to withstand compression, which it did very well. But when the wheel is compressed along one axis, it also expands along the perpendicular axis. This joint design did not fare as well in tension. The sharp corner where the spoke meets the wheel circumference focused stress, and that’s where it broke.
The little wheel held up amazingly well! The kind of abuse it withstood before it finally gave way tells us there’s a significant safety margin beyond what would be considered normal rover operations. And even given this cracked spoke, the rover wouldn’t be crippled. This wheel would still be able to support some weight until we get around to changing it out for an undamaged wheel.
Another important factor in stress tolerance is the type of material. This particular wheel was printed with Monoprice PLA. In the spectrum of 3D printable plastic PLA is considered brittle and prone to cracks like this one. Eventually, though, what ended up motivating a switch to PETG is not brittleness but heat tolerance: PLA rover wheels soften and distort when it got hot.
