A 3D printer is not a fast worker, but as slow as they are, they are still faster than waiting for shipping. This means owning a 3D printer can sometimes be a convenience feature, unblocking project progress while real objects are in transit or perhaps substituting them entirely.
While following the current iteration of JPL Open Source Rover instructions, I was tripped up by an error in the parts list reference. As a practical matter, it meant I didn’t have the aluminum spacers on hand to mount RoboClaw motor controllers to the rover mainboard. Once I understood what was going on and filed the issue on Github, I ordered correct parts from McMaster-Carr and they will arrive in a few days.
But what do I do in the meantime? If I’m not able or willing to wait for the correct spacers, I can design and print my own. It is a very simple shape and a small part that will be quick to print. I didn’t model the threads but it would have been too fine to print anyway – the screws will just self-tap into 3D-printed plastic.
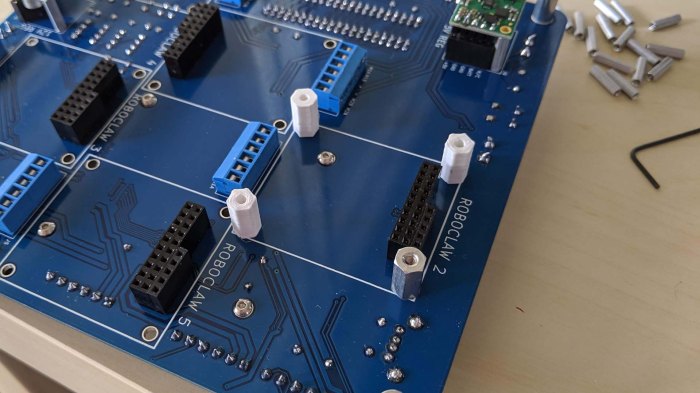
Here are 3 printed and 1 metal spacers on a test run on the rover mainboard, before I installed a RoboClaw to verify all parts worked as planned.
While these plastic parts are weaker than the proper aluminum bits, in this particular application I don’t expect the material strength differences to matter. What is far more useful is the fact they are here right now and I did not have to wait for an UPS truck.
