Completion of soldering circuits for hardware control switches seemed like a good place to take a break and test. It’s fun to keep the momentum going, but it’s also important to stop and verify the work done so far. Off to the shop we go to set things up!
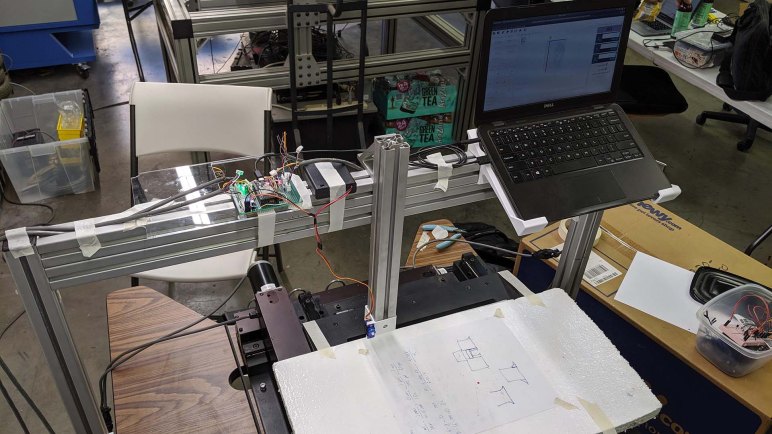
The jury-rigged nature of this prototype test is evident. While I had put a bit of time into building a nice shelf for the computer, none of the other pieces received such attention. Eventually there’ll be an enclosure for the ESP32 running Grbl. A circuit board of the dev module plus all of its associated circuitry, much like the official Grbl ESP32 board. But that board has room for Pololu stepper drivers like those on a 3D printer, and we don’t need that for our Parker motors. That will happen later. For this test, I found a piece of scrap acrylic and taped it to the top extrusion beam to serve as table for the perforated circuit board.
In fact, tape is the dominant element in this test. In addition to the ESP32 platform, tape is held the battery pack for Z-axis servo. Plus all the wires, as it’s not yet clear how we’d want to run wiring for this system. The Parker ZETA4 drivers are still sitting loosely on the bottom shelf of the table, they need to be properly mounted eventually. Once these drivers and the ESP32 are mounted, we will need to consider how to best run wiring to minimize chances of wires getting in the way of our work piece.
In the meantime, everything is held out of the way with tape. Tape tape tape.
Aside from the computer, about the only thing not held by tape was the servo I intended to use to test Z-axis, which received a small 3D printed bracket. However, I ran out of time at home before I could devise something to attach to that servo output shaft.
For that I had to call for help, and Emily answered.
