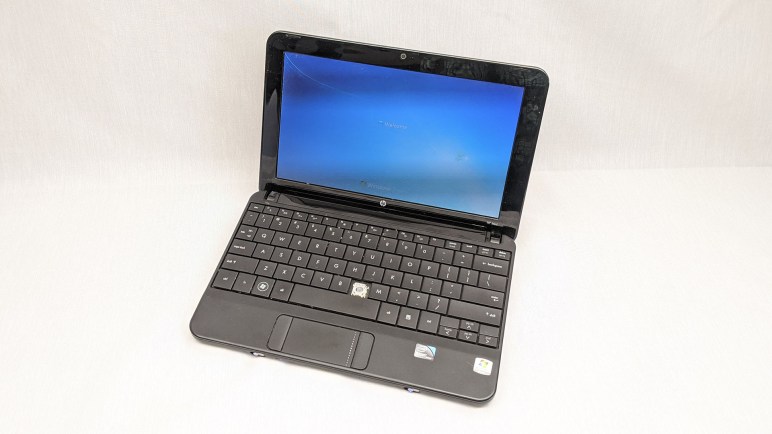
After a quick check to make sure this machine comes to life after charging, I started researching its hardware specifications. A sticker below the machine identified itself as a HP Mini 110-1134CL.
Based on reviews online for the HP Mini 110 product line, this is roughly ten years old powered by an Atom N270 processor. This is a big strike against using this computer as a robot brain running ROS, as the N270 is limited to 32-bit software. The latest longer-term support distribution of ROS “Melodic Morenia” only officially supports 64-bit Intel/AMD chips. If this machine is to run ROS, it would be limited to the previous LTS of ROS “Kinetic Kame” which is not ideal, but at least it will be supported until April 2021.
According to BIOS readout, there is 1GB of RAM installed on this computer. An access door with a memory module icon is visible on the underside of the machine, so a RAM upgrade is probably possible. But I don’t have any old memory modules on hand and I’m not inclined to spend money upgrading a ten year old computer. A single gigabyte is expected to be very limiting, but it is possible to get a very basic ROS installation running on a Raspberry Pi 3, which also only has 1GB. It might get annoying but is probably not going to be a deal breaker.
The BIOS hardware list also describes the hard drive as an old school spinning platter type, which was as expected. Thankfully the Fujitsu MJA2160BH G2. A 2.5″ 160GB 5400 RPM is at least a standard SATA drive and not the compact variant that stumped me earlier. This means I have the option to try upgrading it with one of the SATA SSD drive I already have on hand.
Now that I’m oriented, it’s time to take on the first experiment: see if it can run Ubuntu 16, the basis for ROS Kinetic Kame.
