Our world tour of fellow 3D-printed fan rovers started in Sweden with Jakob Kranz’s Mars Rover project. The next stop is France, or at least, a French-speaking nation: Reproduction du Rover Mars 2020 by Frédéric Jelmoni. (Thanks to Quinn Morley for passing this one along.) This project is still working up to the first complete iteration, and Jelmoni wants to finish V1 before publishing details so we have to be satisfied with glimpses on the web site and YouTube videos.
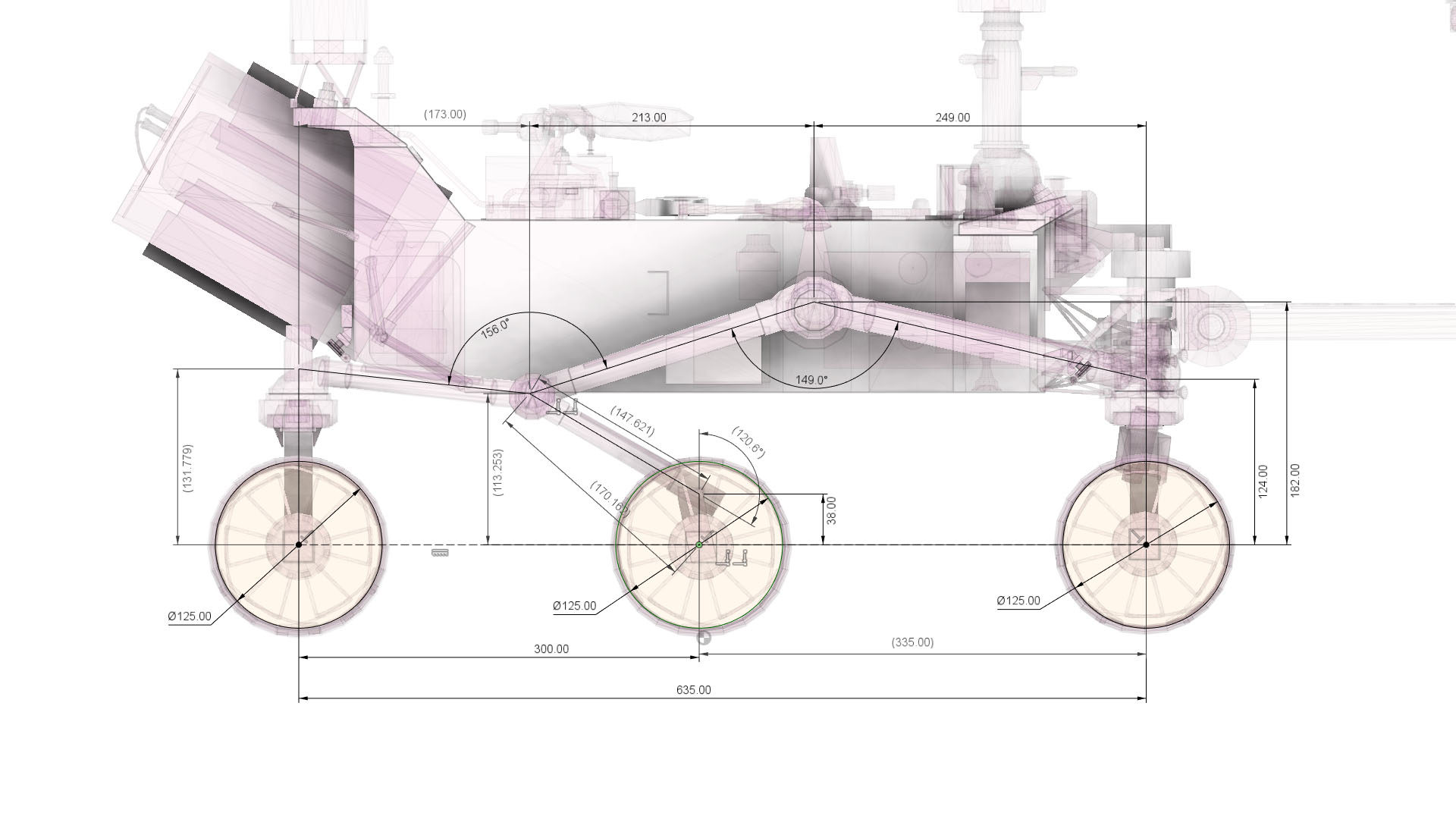
Similar to what I did with Sawppy, Jelmoni took orthographic views of Perseverance rover into Autodesk Fusion 360 and dimensioned a layout to scale. This ensures the rover has correct proportions. Looking at the screen shot of his layout, it looks like his wheels have a diameter of 125mm. This is slightly larger than Sawppy’s 120mm but in practice our rovers should be effectively identical in size.
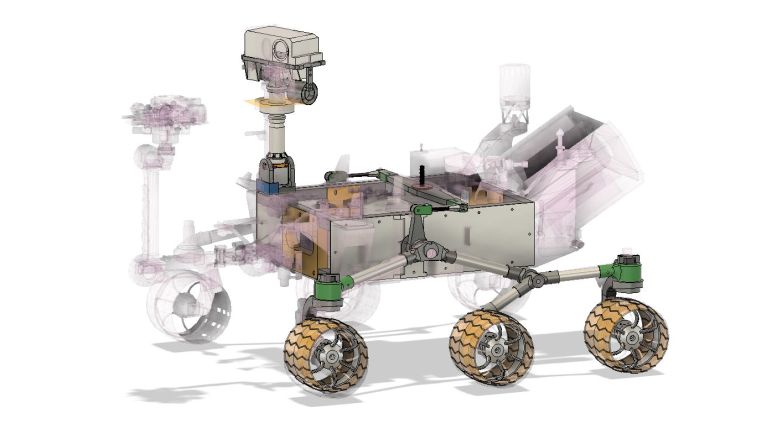
While the body of this rover is built out of aluminum extrusion beams like Sawppy, the suspension arms are built from metal tubes instead. Based on color, my guess is aluminum. This gives an appearance more faithful to the original. The focus on visual fidelity is a consistent theme throughout this project. My Sawppy project gave up a lot of visual fidelity in favor of 3D printing practicality, so our two rover projects reflect different priorities.

A good example are the wheels. These are absolutely gorgeous! The wheel spokes replicate the inner curvature of each spoke, skipping the outer curvature visible in the online 3D model. They look great but I worry about their strength which was why I forfeited fidelity for my own rover wheel design. The 3D printer settings needs to be very well dialed in for optimal layer adhesion, otherwise these spokes are liable to fracture along layer lines. Aussie Sawppy explored a similar idea and the spokes fractured exactly in the way I feared they might. TeamSG blamed it on cheap PLA so I’d be curious if they’ll retry with different filament. Similarly, I’ll be curious to see how this design works out for Jelmoni. Especially if there will be any results from stress testing these wheels.
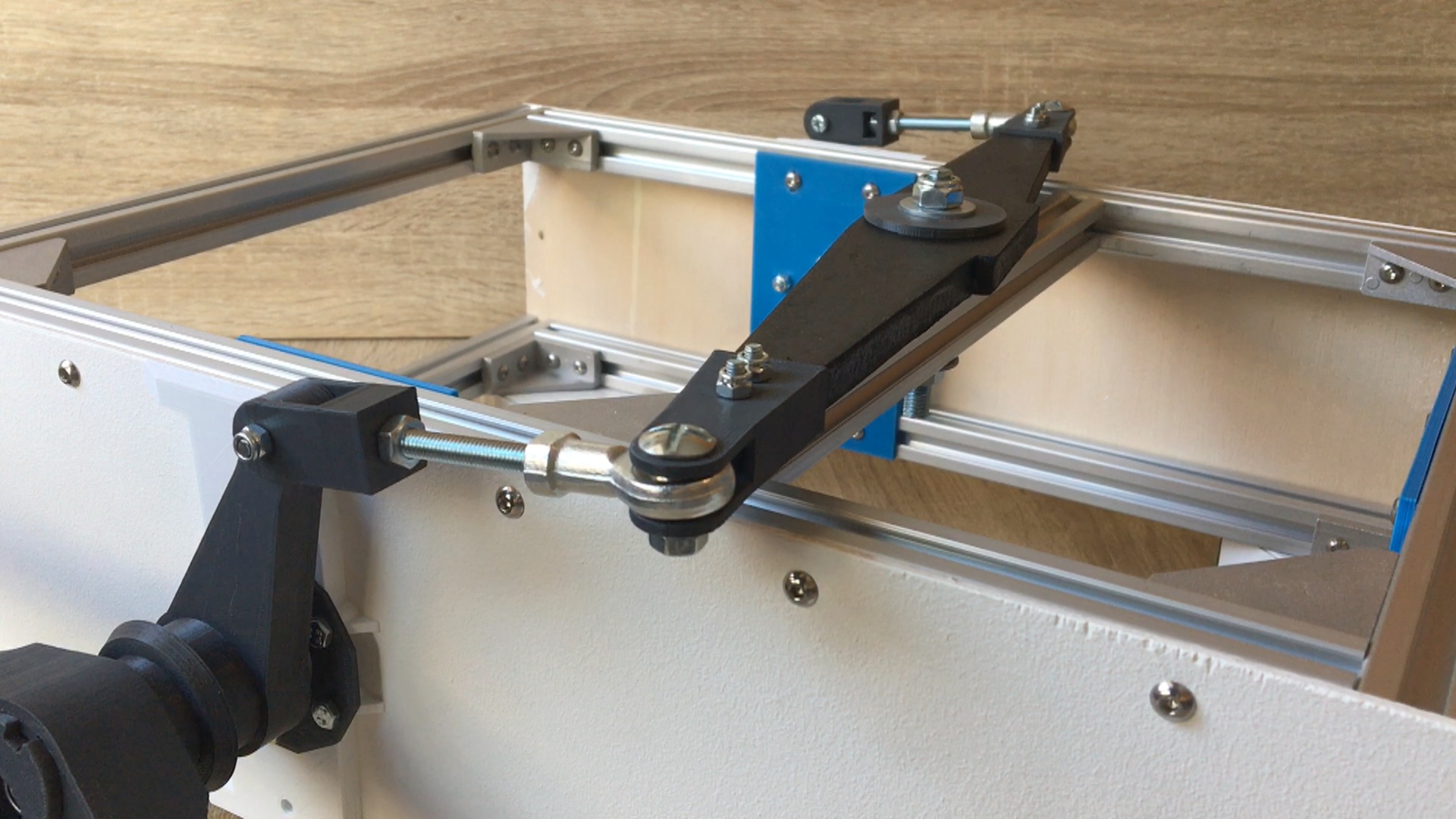
I loved seeing the rocker-bogie differential design used here. I don’t think the main differential body is 3D-printed. It almost looks like MDF (painted black) but I’m not confident on that guess. Many of the linkage pieces are 3D printed, the most illuminating part being the eye bolt used as the differential bar hinge. This is a good way to handle the multi-axis loads, but I find it curious that it is only used on one side of the link and the rocker side has only a single degree of freedom hinge. Perhaps multiple degrees of freedom movement is not as necessary as I thought it might be.
I’m also curious what material is being used for this rover’s flat body sides. These flat textured panels appear to be commodity items and not 3D printed. Which is great because the power of 3D printing is largely wasted printing large flat sheets. They are best at building unique shapes tailored to an application at hand. A focus on that uniqueness to create a clean minimalist design leads to the Bricolabs rovers.
