Micro Sawppy Beta 1 (MSB1) suspension bogie was a single 3D printed piece that incorporated all the features of its bigger sibling’s multi-piece counterpart. Sawppy V1’s suspension bogie was built from three 3D-printed parts, two aluminum extrusion beams, and tens of M3 fasteners. Going smaller on MSB1 allowed such integration, which was a great step towards a key goal of micro Sawppy: Drastically reduce the number of parts. I hoped doing so would make the project easier to do for relative beginners to build.

The suspension rocker, however, was much more difficult to integrate into a single printed part. Its unique geometry was dictated by position of four attachment points:
- Suspension bogie
- Front steering knuckle
- Body
- Differential
These four points do not lie on a plane in the suspension geometry of Curiosity and Perseverance rovers. Even though I was willing to be a little more lax about faithful scale dimensions, I couldn’t find a way to incorporate all the necessary components onto a single part that can be 3D printed flat on the bed without supports. (Supports are another thing I wanted to avoid, to make this friendly to 3D printing beginners.)

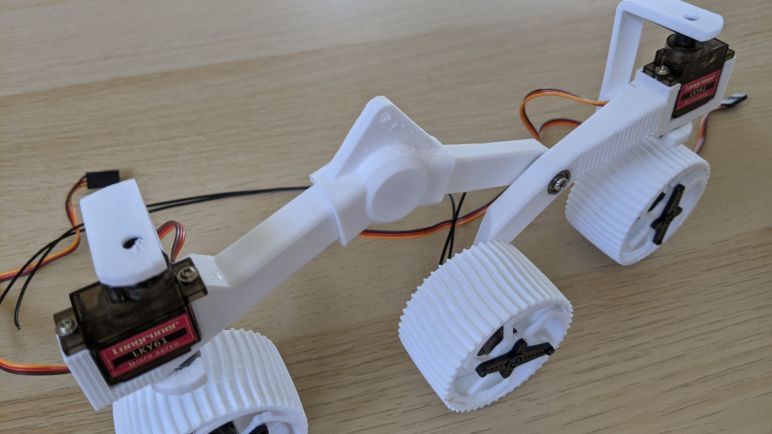
My intuition insists there should be a way to do it and still meet all structural requirements, which mostly meant avoid aligning layer lines along weak points making them vulnerable to fracture. But after several hours fruitlessly scribbling in CAD I resigned to a three-part print for MSB1. Maybe I’ll have a flash of insight for future versions, but MSB1 rocker is split across a front arm, rear arm, and center hub that clamps both arms at the correct angle and attaches to the differential.

I designed a little leeway where the front and rear arms meet, to explore turning the multi-piece construction into a feature. Maybe I can adapt the real rovers’ rocker deploy pivot. RDP is how Curiosity and Perseverance folds up for their trip to Mars and it was on my list of nice-to-have for an evolved rover. Without the center hub clip, these two parts can move a little bit but not quite enough to let the rover fold.

Once the clip is installed, the arms are not supposed to move relative to each other. But because I printed in ductile PETG I detect some undesirable movement. The forces are also tricky to handle in a FDM 3D printer, because no matter which way I orient the hub, it is still at risk of experiencing forces that will split it apart at layer lines.
Several thin hubs were broken before I ended with this thick unit. I guess it fits with the theme of stumpy limbs for a cute baby rover? Nevertheless the stout nature of this hub meant it is really difficult to remove once it is installed, so this variant of the RDP would not be very usable. At least it gives a very solid attachment point to the rover differential.
