Most of the focus for Micro Sawppy Beta 2 (MSB2) is on building a body that resembles real Mars rovers, so its miniaturized rocker-bogie suspension is largely unchanged relative to MSB1, inheriting all the same flaws. The most notable suspension changes are in how its steering servos are installed.


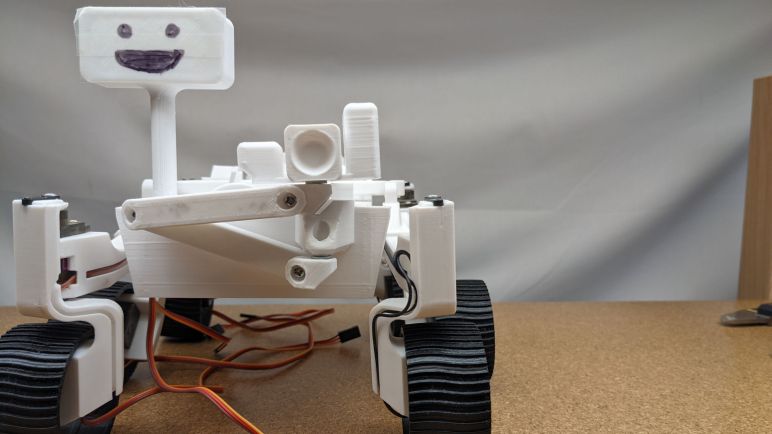
Relative to MSB1, steering servo body is flipped around front-back so the bulk of the servo body faces away from the steering knuckle. The upside is that it allows that bracket to be narrower thus saving space. The downside is that wire routing becomes more convoluted as the wires jut out away from the body and have to double back. It “wastes” some wire length but that has minimal impact, as I’ve determined I had to use servo extension cables anyway.


The other change is that the top half of the bracket is no longer in line (when viewed from the top) with the bottom half housing wheel driving servo, it has been rotated 90 degrees to be in line with wheel travel direction. This approach has several benefits, starting from a cleaner look when the rover is traveling straight ahead. It also increases the steering angle range, giving the bracket more distance before it would make contact with a suspension arm. This change, combined with the fact it is now narrower to begin with, allows much more room for the robot arm.

But there are a few downsides. Since it was printed 45 degrees relative to the 3D print bed, this design doesn’t enjoy the strength offered by a design aligned with print layers. To compensate for this, I made the bracket thicker in high-stress areas, but it still suffered breaks along layer lines in ways that the previous design would not.
Another downside is that it further compromised ground clearance, increasing the chances this plastic might impact obstacles on the ground. I think it’s still acceptable in light of modifications other have made to Sawppy V1, but it is definitely a step backwards.
The lesson I learned from this experiment is: while an one-piece design would satisfy the goals of reducing parts count, it is hard to satisfy all objectives and still remain in one piece. The thicker yet still more breakable bracket made it more difficult to assemble, which also made it harder to diagnose problems and repair them. And neither of these single piece designs allowed manual steering trim adjustment, which is a feature on my wish list.
In light of these experimental results, for the next version of micro rover steering mechanism I will go to a multi-piece design. I also decided to go multi-piece on differential link but for slightly different reasons.
