My little rover prototype Micro Sawppy Beta 2 (MSB2) has a few suspension changes relative to MSB1. The change to its differential linkage system is not as significant as the changes to steering mechanism, more of a small evolution.


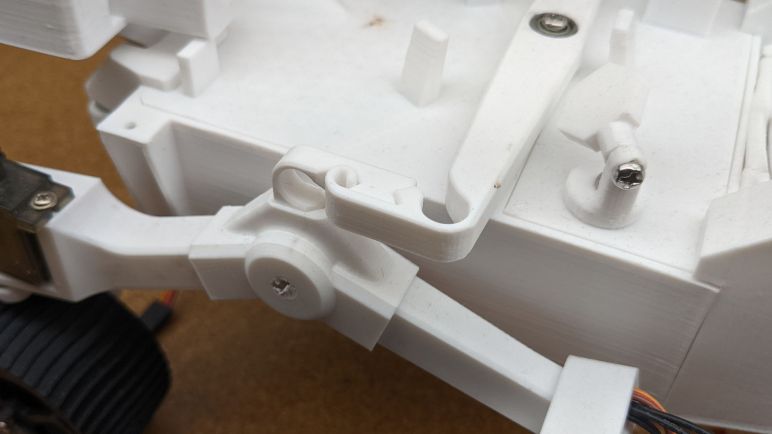
While driving MSB1 around I watched the linkage move and thought it was worth an experiment to see if I could eliminate all the metal components. (Bearing and associated screw and nut.) The linkages became two 3D-printed living hinges that are designed to flex on axis perpendicular to each other. Ideally it would allow each hinge to accommodate most of motion along one axis letting the other one handle the rest. In practice this only partially worked and the hinges were too stiff. The loads didn’t distribute as nicely as I had imagined in my head. Real world is like that sometimes! (Actually most of the time, if I’m being honest.) The end result is that these differential link hinges hindered weight distribution mechanism of the rocker-bogie suspension.
I could make these hinges more flexible by printing thinner plastic, but then we increase risk of fatigue and breakage. PETG is more ductile and durable than PLA, but neither of them are close to properties of dedicated flexible filament. Not all printers can handle TPU or similar materials, and I want to design my rovers to be printable even on cheap basic printers that only handle PLA.
The potential for breakage highlights another problem with tightly integrated designs: if the living hinge breaks, the entire component has to be reprinted. I’m still undecided about using 3D-printed living hinges, so there will be a few more rounds of experimentation to gather more data. But if I want to use living hinges printed from plastic filament not intended to be flexible, I should at least change the design to be a multi-piece part. If the living hinge itself is a smaller separate component, it can be reprinted quickly for replacement in case of breakage. Which I don’t think is a huge risk when rolling around, but unintentional sharp jolts happen a lot when I am trying to open up this rover’s equipment bay.
