My little rover prototype Micro Sawppy Beta 2 (MSB2) had a few suspension changes relative to its predecessor MSB1, but the real attraction is the rover body. Whereas MSB1 had a minimalist box, MSB2 makes an effort to look like Mars rover Perseverance.
The minimalist box of MSB1 is, in fact, a little too minimalist. I thought I made it large enough to accommodate a Raspberry Pi 3 and Adafruit PWM/Servo HAT but I made some mistakes and it was too small, leaving its brain dangling outside the body by wires. Not exactly a robust approach. MSB2 has a much larger body with a correspondingly larger enclosed equipment bay for electronics.
The major structural points of a Curiosity/Perseverance-like rover are where the differential pivot attaches plus the two rocker attachment points. These three attachment points carry the entire weight of the rover so I wanted it to be a strong single piece, but printing it as one piece added a lot of complication elsewhere. MSB2 body was printed upside down so they could be together, but that meant I couldn’t print a bottom since it would be an unsupported top surface while printing. And while I could theoretically seal off the top of the box (since it’s bottom and facing the print bed when printed upside down) I didn’t want to do so for two reasons: One, I wanted to print some surface features to resemble Perseverance, and I couldn’t do that if it’s flat against the print bed. And second, I wanted the equipment bay to be accessible while the rover is standing on its wheels right side up. With all these conflicting desires, the main body box ended up with too many separate pieces. I plan to play with other ideas in future iterations, the next thing I’ll try is to abandon the desire to print all three structural attachment points with a single piece. At this scale, a few M3 fasteners are strong enough to hold things together.
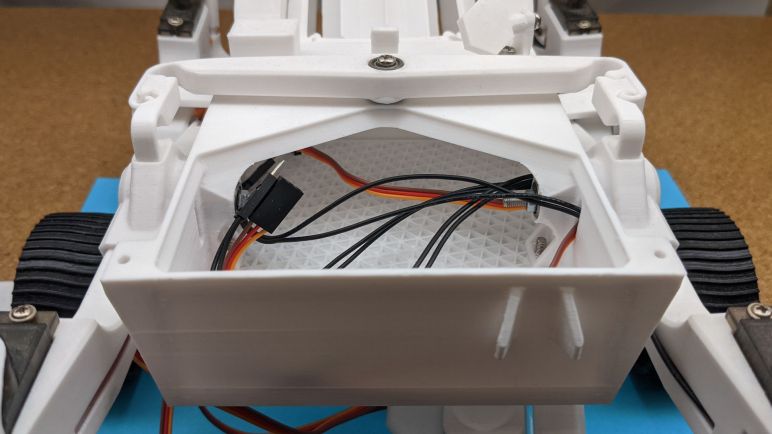
One thing I did like about this box was the volume, which is modest but enough for a Raspberry Pi and Adafruit HAT. I have ambition to build smaller and/or simpler electronics for future iterations of micro Sawppy, but those plans have not yet solidified. I think leaving enough room for Pi and a hat leaves a good upgrade path, but there’s always a question of how much to plan for upgrades. I think it’ll fit some Ardupilot control units, but I don’t know for sure since I lack experience with them. This body is definitely not big enough for something like an Intel NUC, though perhaps it’s enough for a Jetson Nano. However, the sealed box would present cooling challenges for those power-hungry devices, in addition to their need for big batteries.
