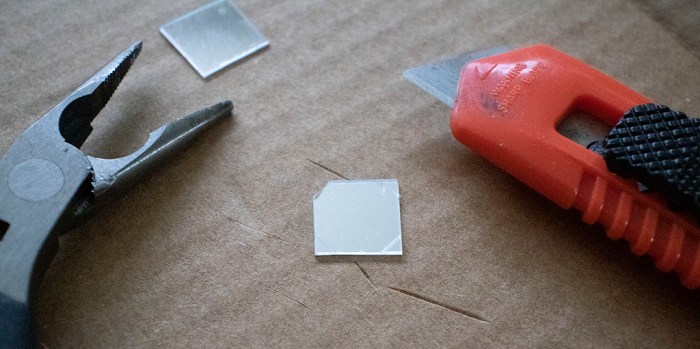
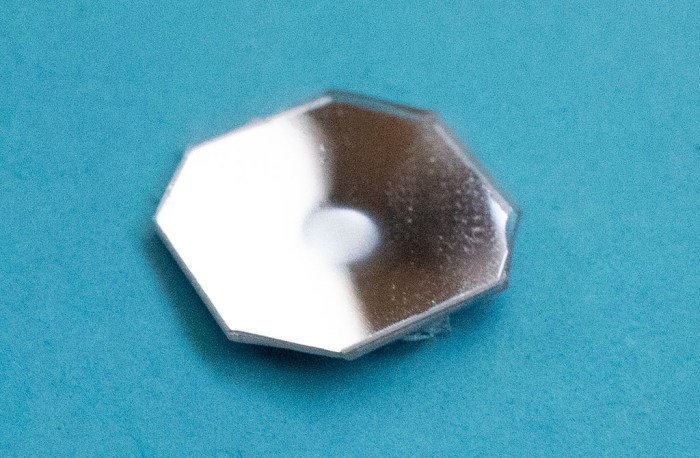
With small plastic mirrors now installed on salvaged laptop speakers, it’s time to put them to work. With their far smaller size, I could place the mirrors much closer together. This is important because if they were too far, beam deflected from the first mirror would spread out in a wider arc than that the size of the second mirror. This was a problem with the initial proof of concept rig, especially when I explored maximum deflection which ended up burning up a speaker. Now, these compact speakers allow mirrors to be only about 15mm apart.
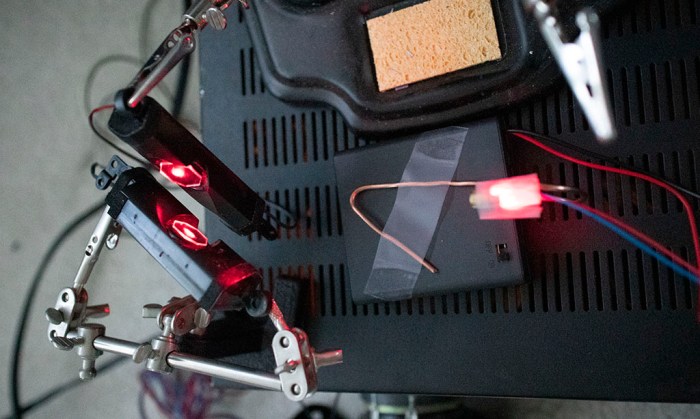
These speakers were again powered by the same thrift-store stereo amp, but keeping in mind the lessons from the last round, I’m more careful about the amp’s output volume. The next challenge was to find ways to hold all the components involved as I experiment with direction, angle, and orientation. Since I only had two hands and there were three components (two speakers and a laser) I needed to summon help.
The laser was taped to a stiff strand of copper wire which I could bend at will to aim the laser. For the speakers, I had two sets of helping hands which typically help me solder electronics together but today they are mirror holders. Their alligator clips hold nice and strong to mounting brackets formerly used to secure these speakers inside a laptop chassis. Together they helped me determine an arrangement that would produce the results I sought. Now I could take what I’ve learned and make it more permanent with a 3D-printed chassis.

















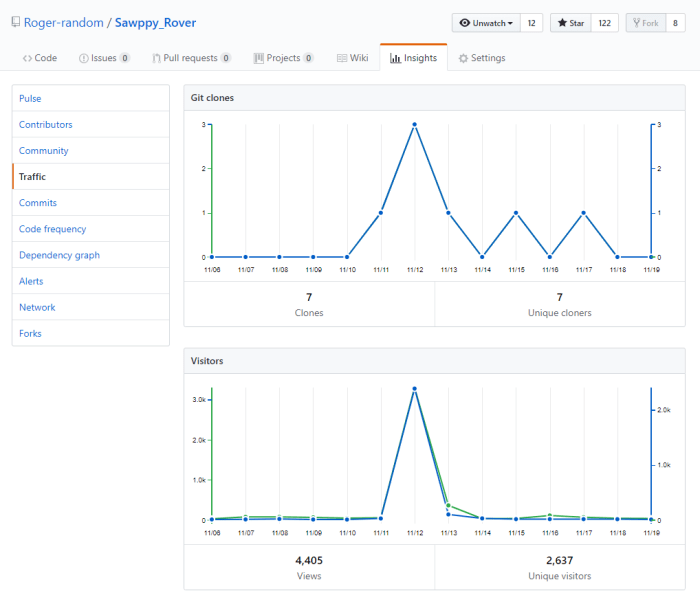 And this bit of exposure might lead to other interesting projects down the line. It seems to have caught the eye of someone with interest in the
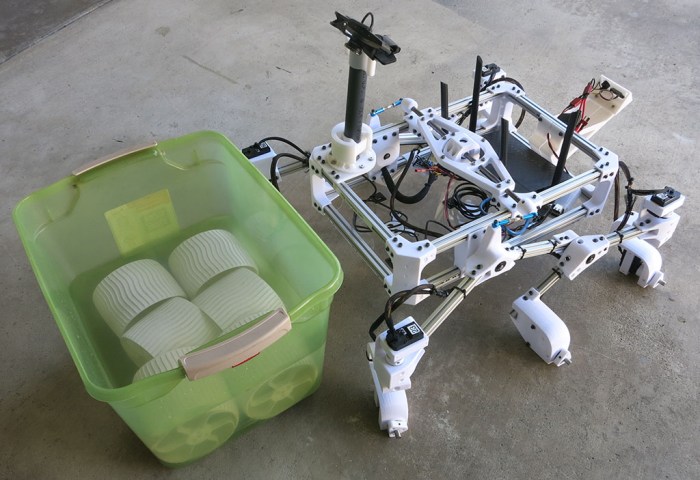
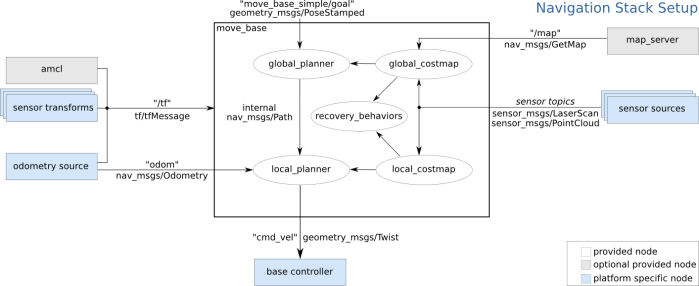
And this bit of exposure might lead to other interesting projects down the line. It seems to have caught the eye of someone with interest in the  I started the Phoebe project with the goal of building something to apply what I’ve learned about ROS. Get some hands-on experience, learning the ropes. Now that Phoebe can map and autonomously navigate its environment, it is a good place to pause and evaluate potential paths forward. (Also: I have other demands on my time so I need to pause my Phoebe work anyway… and now is a great time.)
I started the Phoebe project with the goal of building something to apply what I’ve learned about ROS. Get some hands-on experience, learning the ropes. Now that Phoebe can map and autonomously navigate its environment, it is a good place to pause and evaluate potential paths forward. (Also: I have other demands on my time so I need to pause my Phoebe work anyway… and now is a great time.)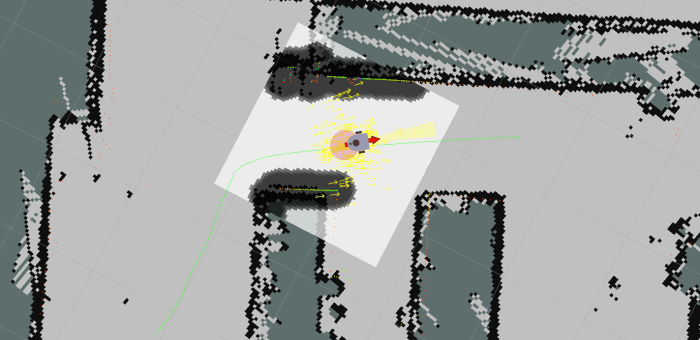

{kind=link}