When local fellow maker Emily upgraded to a big floor standing Delta drill press, her old benchtop drill press was up for grabs. “Free if you pick it up” were the terms of the sale, and I was glad I could pick it up before someone else did. Taking part in countless Emily projects in the past, it shall now play a role in my projects in the near future.
Its long history in the hands of many handy creators showed clearly, with many stock parts missing replaced by either scratch fabricated or adapted parts. This is not a problem at all, a drill press is fundamentally a fairly simple machine and none of the modifications changed its ability to do its core job. Besides, with a less-than-new machine, I feel less intimidated about adding my own modifications as necessary.
The first project on the list addressed a known existing mechanical problem: the drive belt occasionally rubs against the chassis when it is installed in the lowest and slowest of four pulley slots. I inherited a workaround from Emily which I was content to leave in place, but then I saw the set screws holding the pulley to the motor shaft.

I thought it might be worth a shot to try loosening the set screw and move the pulley a little higher. There might be a good reason why the pulley was in its location. I thought it was possible (likely) the motor was not original and had a shorter shaft, or something along those lines. But it was worth investigating.
I put my hex wrench on the set screw and discovered it is loose now. The reason this pulley is too low is because the set screw came loose and it fell down due to gravity. I moved the pulley a little bit higher, tightened the set screw, and we’re back in business without any rubbing between belt and chassis. This was a great start to what I hope will be a long illustrious career for this drill press, enabling my project ideas in the future.







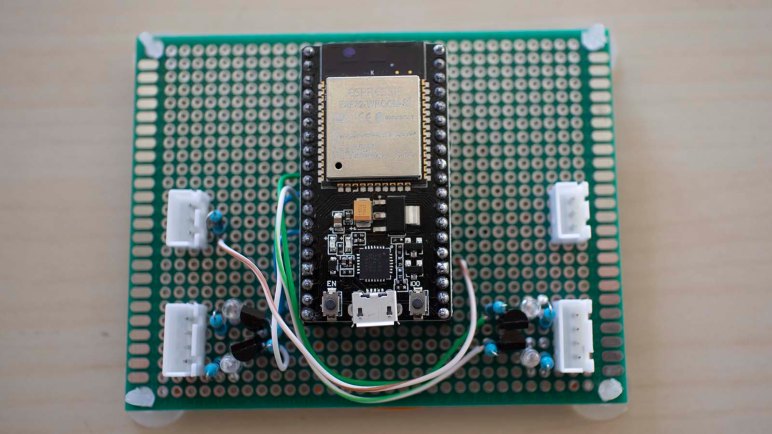






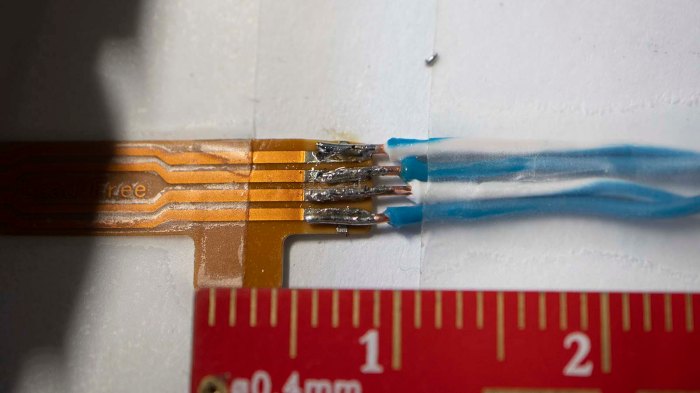 There is slightly less solder than I would have preferred on each of these joints, but several efforts to add solder created solder bridges across pins. Requiring removal by solder sucker, which reduced the amount of solder even more. Since there was enough for electrical conductivity, I left it as is to
There is slightly less solder than I would have preferred on each of these joints, but several efforts to add solder created solder bridges across pins. Requiring removal by solder sucker, which reduced the amount of solder even more. Since there was enough for electrical conductivity, I left it as is to