When I looked wistfully at rosserial and how it doesn’t seem to have a future in the world of ROS2, I mentioned micro-ROS appeared to be the spiritual successor but it required more powerful microcontrollers leaving the classic 8-bit chips behind. Micro-ROS doesn’t quite put microcontrollers on a ROS2 system as a first-class peer to other software nodes running on the computer, as there still needs to be a corresponding “agent” node on the computer to act as proxy. But it comes closer than rosserial ever tried to be, and looks great on paper.
Based on the micro-ROS architectural overview diagram, I understand it can support multiple independent software components running in parallel on a microcontroller. This is a boost in capability from rosserial which can only focus on a single task. However, it’s not yet clear to me whether a robot with a microcontroller running micro-ROS can function independent of a computer running full fledged ROS2. On a robot with ROS using rosserial, there still needs to be a computer running the ROS master among other foundational features. Are there similar requirements for a robot with micro-ROS?
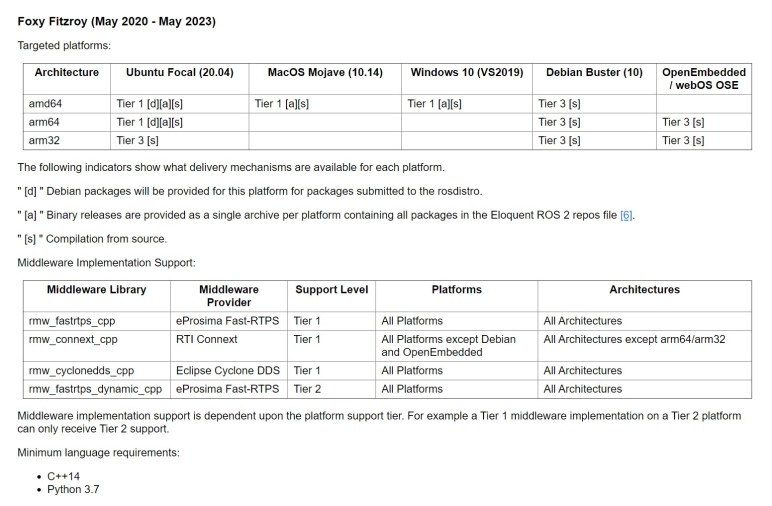
I suppose I wouldn’t really know until I set aside the time to dig into it, which has yet to happen. But the likelihood just increased. I knew that the official support for micro-ROS started with various ARM Cortex boards, but reading the system requirements I saw nothing that would have prevented the non-ARM ESP32 from joining the group. Especially since it is a popular piece of hardware and it already runs FreeRTOS by default. I have a few modules already on hand and I expected it was only a matter of time before someone ported micro-ROS to the ESP32. Likely before I build up the expertise and find the time to try it myself.
That expectation was correct! A few days ago an announcement was posted to ROS Discourse that ESP32 is now officially part of the micro-ROS ecosystem. And thus another barrier against ROS2 adoption has been removed.