If I were to experiment with upgrading my Sawppy to ROS2 right now, with what I have on hand, I would start by putting Ubuntu ARM64 on a Raspberry Pi 3 for a quick “Hello World”. However, I would also expect to quickly run into limitations of a Pi 3. If I wanted to buy myself a little more headroom, what would I do?
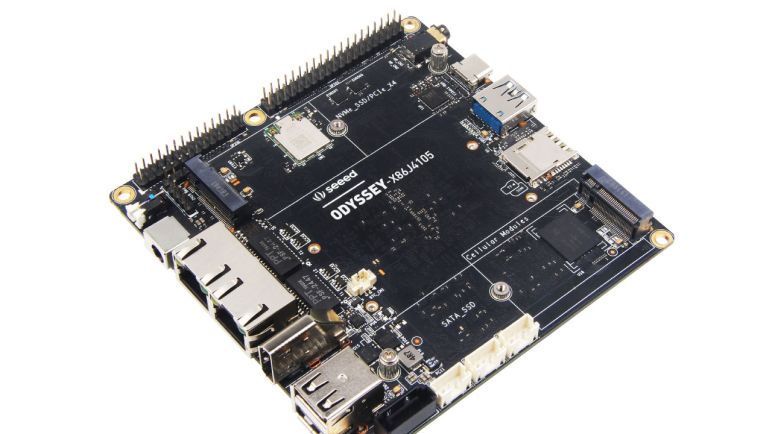
The Pi 4 is an obvious step up from the 3, but if I’m going to spend money, the Seeed Studio Odyssey X86J4105 is a very promising candidate. Unlike the Pi, it has an Intel Celeron processor on board so I can build x86_64 binaries on my desktop machine and copy them straight over. Something I hope to eventually be a painless option for ROS2 cross compilation to ARM, but we’re not there yet.
This board is larger than a Raspberry Pi, but still well within Sawppy’s carrying capacity. It’s also very interesting that they copied the GPIO pin layout from Raspberry Pi, the idea some HATs can just plug right in is very enticing. Although that’s not a capability that would be immediately useful for Sawppy specifically.
The onboard Arduino co-processor is only useful for this application if it can fit within a ROS2 ecosystem, and the good news is that it is based on the SAMD21. Which makes it powerful enough to run micro-ROS, an option not available to the old school ATmega32U4 on the LattePanda boards.
And finally, the electrical power supply requirements are very robot friendly. The spec sheet lists DC input voltage requirement at 12V-19V, implying we can just put 4S LiPo power straight into the barrel jack and onboard voltage regulators will do the rest.
The combination of computing power, I/O, and power flexibility makes this board even more interesting than an Up Board. Definitely something to keep in mind for Sawppy contemplation and maybe I’ll click “Add to Cart” on this nifty little board (*) sometime in the near future.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
