At the SGVHAK meet a week before SCaLE, the rover ran around for the first time in a public-facing configuration. It was a trial run to see how it would do, and we managed to expose a weakness in the corner steering motor gearbox. With a broken gearbox, the rover is crippled. We have the option to just drag the uncooperative wheel along, as JPL did for their Mars rover Spirit. (It’s even the same location: right-front wheel.) But since it is accessible on a workbench instead of on another planet, we should try to fix it.
Here were our thoughts on the motor:
The most obvious solution is to replace the broken unit with another identical unit, which we are not going to do because this gearbox has already proven itself to be too weak to handle the job. Instead, we’re going bigger: replace with a unit rated to handle more torque. This solution has a few concerns: the first is that it increases cost of rover design, the second is we still have nothing to absorb sharp shocks to the system. We can only “go bigger” for so long.
The third and most critical concern is time. We had wanted to demonstrate the rover running around at SCaLE 16x but the shipment of upgraded gearmotors won’t arrive in time. We need a short-term solution that we can build with what we have on hand, and the best candidate in the here-and-now parts pile are remote control hobby servos. Hacking a steering fix with servos serve two purposes: First, we hope it gives us a drivable rover by SCaLE. Second, it tests an idea that’s been kicked around.
Using remote control hobby servos to steer has the potential to reduce both rover parts count and cost. And devices called “servo savers” are an established solution from the remote control vehicle world to absorb sharp shocks to a steering the system. It’s something promising to investigate and, with a broken gearbox and a deadline, we have motivation to do so.
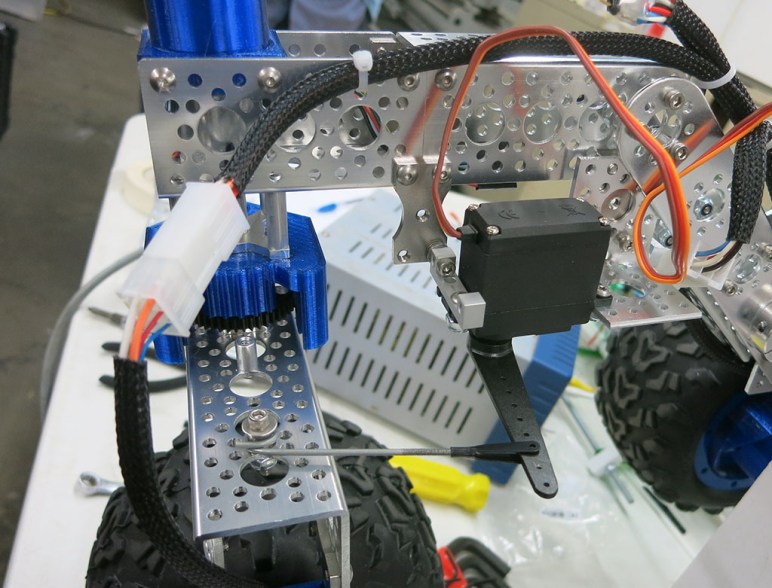
While I worked on the software modifications to support a steering servo, @mle_makes jumped into physical fabrication of a mounting bracket. Her resourceful fabrication using parts already on hand results in a jury-rigged servo mounting bracket that lets us steer the wheel until replacement motors show up. This configuration, with a servo handling one of the corner steering duty, was what we ran around at SCaLE and it worked really well. In fact, this corner survived the abuses of the weekend better than the others! With this hack’s success, we contemplate a future rover variant focused on servo motion.
