We have wired up our first pass of a stepper motor controlled Z-axis, with a stand-alone stepper motor driver powered by a stand-alone 110V AC to 12V DC power supply unit. All connected to a mechanical assembly that was formerly the X-axis of a Monoprice Mini 3D printer.
First test was to verify electrical functionality. The entire assembly was connected to our Grbl ESP32 controller while sitting on the XY table, and we verified there were no escapes of magic smoke. (Yay!) We then used bCNC on the laptop to command Z-axis movement, and verified the direction was correct. (The distance was not, but we can figure that out later.) At this point we were running short on time available at the shop, so we followed up the electrical test with a quick and dirty mechanical test.
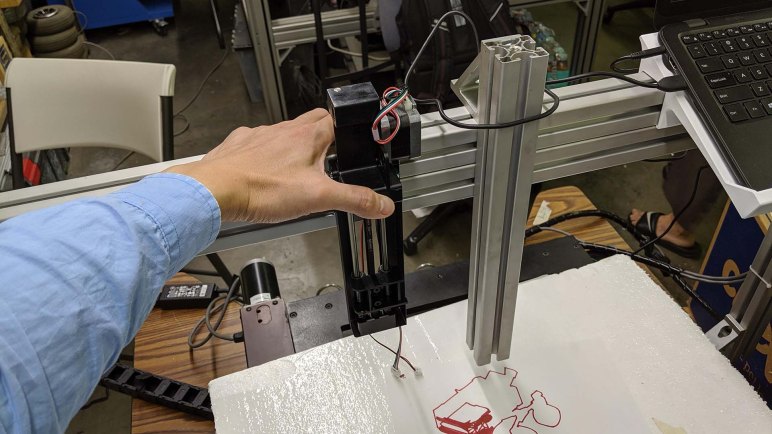
The machine has a vertical aluminum beam where we had taped our sharpie markers earlier, and fastened our servo Z-axis for that series of tests. Now, with a mechanical assembly almost as tall as the beam, we’ll need to decide if we still need that vertical beam for permanent installation.
But for a temporary test while we were short on time, the vertical beam is great for us to zip-tie the mechanical assembly in place. It is crooked (not nearly vertical) but it was enough for us to gain confidence this assembly is actually going to work for us. There are still things to be figured out: a rigid mounting solution that doesn’t involve zip ties, plus Grbl parameters to correct movement distance.
But for today, we’re just happy to run through homing routine on all three axis before proceeding further.
