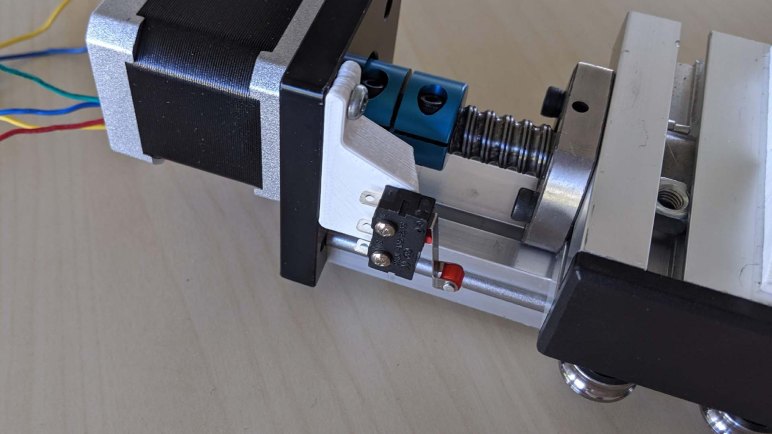
So we’re changing the Z-axis mechanism yet again, but before we can mount it on the machine, the newly salvaged hardware needs a few additions. First on the list is a homing switch. The switch itself is a small momentary roller lever micro switch multipack purchased from Amazon (*) and its mounting bracket will be 3D printed. The bracket will in turn be installed to one of the conveniently tapped hole that already existed on the motor mounting plate. This set of holes might be for compatibility with a larger printer, but for this machine’s purposes it will host a homing switch.
The height of the homing switch mounting bracket will be dictated by the distance between the top of the carriage and the blue rigid coupler connecting the ball screw and motor output shaft. If the bracket is too tall, we lose valuable range in our linear travel distance. If the bracket is too short, it would be useless because the carriage will hit the coupler before it triggers the switch.
We actually have some debate which way should be Z-axis “zero”. There are two potential ways to mount this linear actuator module, and there are two schools of thought on where Z zero should be. Should it be the top of the range of travel (common in CNC vertical mills) or the bottom of the range (common in 3D printers and plotters)?
For today we’ll proceed with this simple switch mount because we’re not even sure this mechanism will work yet. It is the easiest thing to do right now, so let’s not overthink things until we establish it works. The test we’ve been using for motion control is to try drawing with a pen, so I’ll set that up.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.
