Since the time I’ve published my Sawppy rover project, I’ve learned of a few other rover projects with no relation to Sawppy (other than being inspired by the same rovers on Mars) but also utilize 3D printing. These are far more affordable than trying to duplicate the mechanical workings of a rover in LEGO. This collection also happens to hail from around the world. The first stop of this world tour is Sweden, home of a rover published by Jakob Krantz titled simply “Mars Rover”. It uses commodity PVC pipes for suspension structural members instead of the aluminum extrusion beams I used on Sawppy. The overall size is slightly larger than Sawppy, with different proportions. For example, the wheels and body appear to be smaller than proportional to Curiosity. But it is recognizably and undeniably inspired by NASA JPL Mars Rovers.
Full rocker-bogie is presented and accounted for, including 3D-printed links for the differential. Sawppy didn’t use 3D printing for these parts, it used the same hardware used on the JPL Open Source Rover. They are adjustable suspension link turnbuckles from the remote control car world, and I have yet to think up or find a 3D printed design that worked as well as those turnbuckles. It’s not clear how Krantz’s design handles rotation across multiple degrees of freedom and browsing the published CAD file only shows gaps where some critical components of the joint (bearings? bushings?) would sit. How these differential links function remains a mystery to me for now.
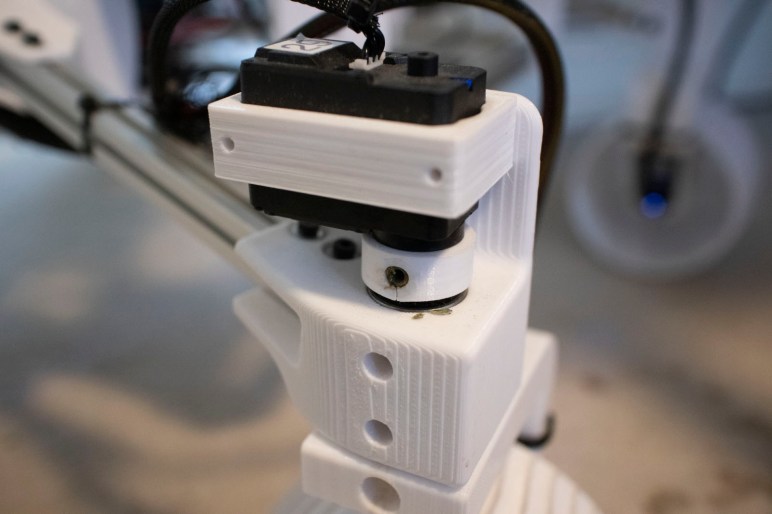
The published parts list included several bearings, all of which appeared to be used in the rocker-bogie suspension. Examining its CAD file confirmed that all wheel forces are sitting directly against the drive motor gearbox, and all corner wheel forces are directed into the steering servos. I prefer to have ball bearings handling such forces instead of the motor gearboxes directly, and designed Sawppy to use a pair of 608 ball bearings at each rotational joint. Perhaps overkill, but it’s what I like to have.
On the electronics side, Krantz’s rover uses ESP32 for its brains. As a powerful and affordable microcontroller with wireless capability, it is a very good choice for robotics projects. Especially since it is now one of the supported Micro-ROS architectures for interfacing with ROS2. I haven’t seen any interest from Krantz about putting ROS2 on his rover, but the option is there if he wants to.
And there’s plenty of time for future work. Like Sawppy, this rover is a long-term project of Jakob Krantz who has been working on his rover for at least a year. Or at least, there were two Hackaday writeups for his project a year apart. It is a labor of love and I know that well. It’s a journey that Frédéric Jelmoni has recently embarked on for a younger rover project focused on Perseverance.