Commodity TT gearmotors became the center of my attention once I decided to switch to using DC motors for driving wheels on my little Sawppy rover project. Where did this form factor come from? Why do people call them TT? Why are most of them yellow? I don’t have answers to those historical questions, but I will see if I can build a little rover with them.
The adventure starts with buying a batch and taking one apart to see what’s inside. I’m not sure if the commodity TT gear motor market has diversified implementation like the micro servo market. If this experiment with TT motors go well, I expect I’ll buy more batches in the future for more little rovers and I’ll open those up to look for differences. Right now I could only speak to this one.

Externally, we see three mounting points. Two mounting holes go through the entire gearbox, next to the two screws holding the gearbox together. A third mounting hole is on a thin tab at the end opposite from the motor. There are two attachment points to the output shaft, which appears to be symmetric and have identical detent patterns. Turning the output shaft by hand, I can see the other output shaft moves in sync, but that doesn’t necessarily mean it is a single piece.
While the output shafts appear symmetric, the rest of the gearbox almost but not quite symmetric. The motor is offset by a little over a millimeter away from the camera in these pictures. On the side facing the camera, we see a little nub above the axle, whereas its opposite side is smooth.

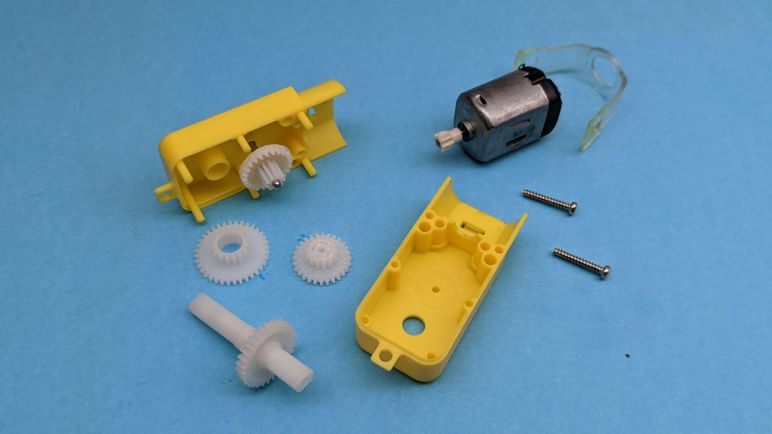
The motor is held in place by a band of clear elastic plastic held by hooks molded into the gearbox exterior. In this particular unit, the clear plastic has partially melted into the yellow plastic and had to be peeled off with pliers before I could stretch them for removal. Once the clear plastic is removed, the motor can slide out. (To release just the motor, it is not necessary to remove the two screws seen in this picture.)
The motor looks very much like a commodity form factor used in many battery-powered toys. In disassembly and hacking circles I frequently see it referred to as “Mabuchi motor”. But just like “JST connector” this is not precise enough. Mabuchi Motor Company has a large product line, most of which aren’t this thing. I found references to this sized motor as FA-130, but with such commoditization I’m certain the majority aren’t genuine Mabuchi products. There’s certainly no Mabuchi logo on this particular motor.
What’s important for the purposes of project creation is that this is a common form factor. And thanks to its use in products like the Tamiya Mini 4WD product line, we can get motors with a wide range of performance characteristics. Same external motor dimensions, but different tradeoffs for torque vs. max speed, etc. At least that’s the theory, I won’t know for sure until I try buying one of those Mini 4WD Hop-Up motors and try installing it in one of these gearboxes.

With the two screws removed, I could open up the gear box and see the gears inside. Pulling the gear train apart, I find four separate components.

My first observation is that all the gears appear to have different diameters. I’ve seen a few TT gearbox modding guides that claim I could select different gear ratios by flipping some gears around, but I don’t see how that is possible when the gears are all different diameters. I’m either overlooking something, or this unit is the wrong variant for that mod to work.
My second observation is that the output shafts poking out on both sides of the gearbox are indeed part of a single piece shaft. There are no ball bearings here but at least they are supported on both sides of the shaft. However, since the output shaft is very clearly asymmetric, I should pay attention to which side is used as the main weight bearing member. Looking at this teardown, I have a clear preference for the side further from the camera in these pictures. That side of the shaft has far more support, in the form of a plastic tube approximately 8mm long. The side closer to the camera (and laid flat against the surface in these pictures) has only a thin wall of plastic for support.
I wonder if there’s a situation where the opposite is true? Perhaps when torque is a concern and we want to be closer to the final output gear, in order to minimize torque imposed on the shaft? I don’t think that’s likely at this power level, but I’ll keep an eye open for the possibility.
I didn’t need to take apart this DC gearmotor to use it, but having seen its insides I feel more confident approaching the task of mechanically adapting it to rover duty. In the meantime, I have a parallel adventure of learning how to drive these motors electrically.
