I’m now looking at DC motor with gearbox for rover locomotion. I started my little rover project with the intention of using micro servos all around. For six wheel drive, they would be modified for continuous rotation. This is a tradeoff: we gain a servo’s existing H-bridge circuit with proportional control, but we take the risk of putting a physical load it is not designed for. Unfortunately I found a problem with my Beta 2 chassis: some of these inexpensive micro servos lack useful proportional control. If I can’t depend on a servo’s existing circuitry, I might as well switch to a different gear motor: the TT gear motor.
Similar to micro servos, the TT gear motor has become a commodity item. Made by lots of manufacturers and sold by lots of vendors. (*) Where did this design start, why is it called “TT”, and why are they all yellow? Sadly I found no satisfying answers to these historical questions. Searching on the internet was made difficult by their name, which tends to return results relating to a real car, the Audi TT. Did this gearmotor start life in a toy car modeled after the Audi TT? So many questions, so few answers.
The only bit of information I found hinting at a source was a mention on the product page for Solarbotics Gear Motor 3 which superficially resembles the TT gearbox. However, it is not called TT there, and it is not yellow, so clearly this is not the entire history.
Based on the original design by Mark Tilden for use in the B.I.O.Bugs & RoboSapien, these motors are the next generation with a variety of improvements such as dual output shafts and a lower current motor.
Product Description for Solarbotics Gear Motor 3
I found no corroborating information beyond that snippet of text.
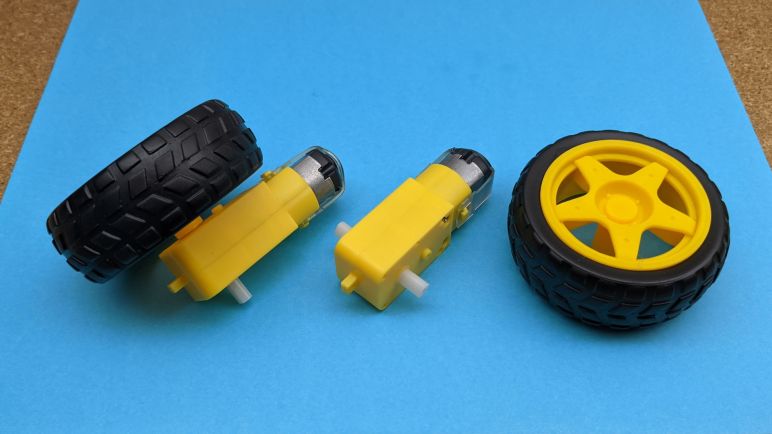
Anyway, back to the device itself: we can see it uses a much larger motor than the one inside a micro-servo, which may be (but not necessarily) more powerful. A larger gearbox also implies larger and more durable gears. But the most important part is that these are used to drive the wheels in a robot kit. For example, Servo City’s Runt Rover series use this type of motor for their wheels, albeit in black instead of yellow. The fact they are designed for wheels makes me more comfortable I’m using mechanical parts for their designed task. Which was a worry for (mis)using continuous rotation micro servos for micro Sawppy beta 1 and 2 rover wheels.
And thanks to the popularity of this form factor, we have an ecosystem of variants in the same size and fit the same axle. The standard gear ratio is 1:48, but other gear ratios are offered for those who want to make different tradeoffs between speed and torque. High torque gearboxes need to more durable, but not to worry, this form factor with higher gear ratios are also available with all metal gears in products like Adafruit #3802.
A particular wheel design is most commonly associated with this gearbox, but there are alternate wheel choices to fit onto that axle. The axle is large and simple enough that we can probably FDM 3D print our own wheels as well. That output shaft is symmetric so some robot kits put two wheels, one on either side. But I usually see the other end either left unused or used for an encoder wheel for low resolution wheel odometry. (*) If we want higher resolution encoders, we can buy variants with an encoder on the motor.
This all looks very promising so I bought some TT gearmotors for experimentation. First order of business: take one apart to see what I’m working with.
(*) Disclosure: As an Amazon Associate I earn from qualifying purchases.

Thanks for the post on TT motors, we found it informative. You mention Mabuchi as a possible mfg for the GM3 (Tilden Motor). Is it well known that Mabuchi was or is the mfg for this gearmotor?
LikeLike
I understand Mabuchi to be a manufacturer of just the electric motor. (Metal can and black end plastic) Somebody else makes the gearbox (yellow plastic, etc.)
LikeLike
Thanks. In extensive testing, the Tilden gearbox design is remarkable to us. It has lasted hundreds of hours (480 hours so far) while drawing 0.1-0.2A with no easy detectable sign of fatigue or wear. Do you know if there is a major use for these now that Robosapien and RipRap uses have declined?
LikeLike
I don’t know of any major products that use them, but this general form factor has become very common in the hobbyist & STEM education market. Note while the general form factor is fairly consistent, the execution details varied within the few vendors I’ve purchased from. Example: output shaft on one gearbox is a two-piece design with a clutch that will slip in case of stalling, but another gearbox has a single-piece output shaft without a clutch that will strip its gears if stalled. In reference to your point: I expect some of these will wear out faster than others.
LikeLike