Whenever I build something physical from my imagination, the reality always served a few surprises I failed to anticipate in my mind. Two recurring themes are seeing real joints flexing beyond their primary rotation axis, and realizing physical objects aren’t as perfectly rigid as they are in CAD. Nothing exemplifies this more than the rocker-bogie suspension of my Sawppy rovers. Their movement are well-defined when I articulate them in CAD, but once printed and assembled, I saw movement that weren’t in my CAD model. When rolling over obstacles, Sawppy would wobble and bounce in response to mechanical shocks that weren’t absorbed by its curved wheel spokes. A few other Sawppy rovers builders have asked me to check if this was supposed to happen on their rovers. I answered that it was not an intentional design feature, but they have done nothing wrong as I see it on my rover as well. I joked that our rovers are just dancing.
Part of this comes from Sawppy’s low-cost construction. The aluminum extrusion beams are not as rigid as the carbon composite tubes of real Mars rovers, and the 3D-printed connectors for those beams are not as rigid as CNC-machined metal components. The commodity 608 bearings I used for Sawppy’s joints give me smooth movement and load bearing capability, but they also add some mechanical slop to the system.
But part of this came from the suspension geometry itself, which is unlike suspension systems of cars we drive here on planet earth. Due to far higher speeds involved, our car suspensions are robust and bolted to car chassis at multiple points for added rigidity. In contrast, Mars rovers experience road impacts at a far slower rate, reducing the need for a heavily braced system. Such bracing are undesirably heavy on their strict weight management regimen. So rover suspension components are rather spindly and are attached at only one (or in rare cases, two) points. With so few attachment points, and a multi-segmented construction that puts large subassemblies at the end of several joints, any component movement and flex is compounded.
I had been curious how this tradeoff manifested on real Mars-bound rovers. They have sturdier components, but Sawppy copied their geometry and share the associated challenges. I kept my eyes open on footage of Perseverance rover while it was being tested to see if I see any wobble or bounce, but those tests are slow-moving affairs that imposed no major mechanical shocks to propagate through the system. Since I don’t expect anyone to swing a sledgehammer at the rover, I had resigned to never knowing.
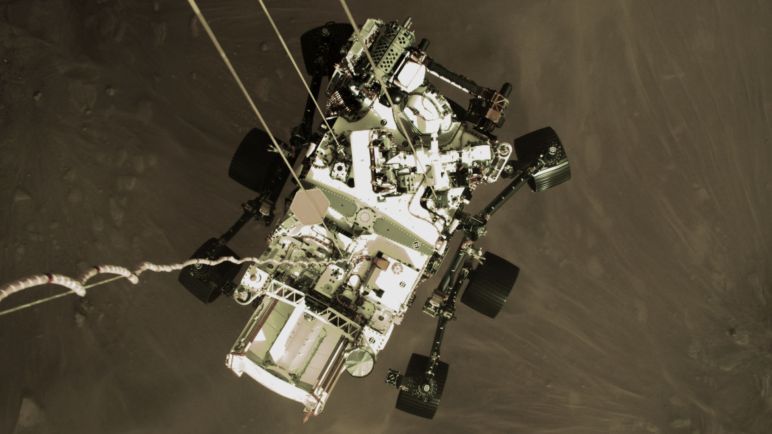
But then I was happily surprised when I watched video footage of Perseverance landing sequence, specifically the part where the descent stage unspooled its tethers to lower the rover. (Thanks to Emily Velasco for turning it into an animated GIF I can embed here.)

During this sequence, Perseverance suspension was released from its compact travel configuration and unfolded to its driving configuration in preparation for landing. This drop-and-lock action imposed mechanical shock on rover suspension elements, and we can see everything wobbling and bouncing just as I see frequently on my own little rover. It was both enlightening and entertaining to know that real Martian rovers can dance, too! They just choose not to, most of the time.
UPDATE: NASA JPL has released sounds recorded by Perseverance on-board microphone as it started driving across the Martian landscape. In that sound clip, we can hear rover suspension components flex and squeak in response to driving over surface features. Not too different from what I hear from my own Sawppy rover.
